 Optimus Prime em forma bípede, do filme "The Transformers". Ver mais fotos de robôs . Imagem © 2007 Dreamworks Pictures p Sem duvida, a equipe do HowStuffWorks está ansiosa com o próximo filme "Transformers". Não apenas nos perguntamos se será bom. Nós nos perguntamos se veremos robôs com capacidades de Transformers durante nossas vidas. Embora os Transformers em escala real pareçam um pouco implausíveis - e impraticáveis -, alguns robôs existentes têm muito em comum com os Transformers. Neste artigo, vamos explorar a aparência desses robôs transformadores, como eles funcionam e como são semelhantes a Transformers como o Optimus Prime.
p Começaremos com uma análise do próprio Prime. Ele é enorme e impressionante, mas ele poderia ser real? Descobrir, perguntamos ao engenheiro Michael D. Belote o que seria necessário para construir um trailer de tamanho real que pudesse se converter em um robô bípede. Em outras palavras, o que seria necessário para fazer uma versão em tamanho real do Optimus Prime?
Optimus Prime em forma bípede, do filme "The Transformers". Ver mais fotos de robôs . Imagem © 2007 Dreamworks Pictures p Sem duvida, a equipe do HowStuffWorks está ansiosa com o próximo filme "Transformers". Não apenas nos perguntamos se será bom. Nós nos perguntamos se veremos robôs com capacidades de Transformers durante nossas vidas. Embora os Transformers em escala real pareçam um pouco implausíveis - e impraticáveis -, alguns robôs existentes têm muito em comum com os Transformers. Neste artigo, vamos explorar a aparência desses robôs transformadores, como eles funcionam e como são semelhantes a Transformers como o Optimus Prime.
p Começaremos com uma análise do próprio Prime. Ele é enorme e impressionante, mas ele poderia ser real? Descobrir, perguntamos ao engenheiro Michael D. Belote o que seria necessário para construir um trailer de tamanho real que pudesse se converter em um robô bípede. Em outras palavras, o que seria necessário para fazer uma versão em tamanho real do Optimus Prime?
p Primeiro, Prime tem que ser um robô autoconfigurável . Alguns robôs autoconfiguráveis, ou robôs que podem mudar suas formas para realizar tarefas diferentes, existe hoje. Contudo, eles são muito diferentes do Optimus Prime. Como explica Belote: Com robôs autoconfiguráveis, o engenheiro normalmente prefere manter o indivíduo, módulos móveis pequenos, simples, barato, e intercambiáveis; no caso do Optimus Prime, Contudo, estamos lidando com um robô cujos módulos individuais são tão grandes quanto a cabine de um caminhão. Mesmo que construir tais módulos fosse possível, a despesa seria exorbitante, e a extraordinária complexidade tornaria virtualmente impossível fazer com que todos os sistemas operassem corretamente juntos. p Se os engenheiros descobrissem como fazer módulos intercambiáveis na escala do Optimus Prime, ainda pode ser impossível fornecer energia para movê-los. Em sua forma de veículo, O Optimus Prime pode funcionar com combustível diesel comum. Mas andar é muito menos eficiente do que andar sobre rodas. Para andar, O Prime precisaria de muito mais potência do que um motor a diesel poderia fornecer. Aqui está a análise de Belote de como lidar com os requisitos de energia do Prime: Os robôs tradicionais são construídos sobre uma das três fontes de energia - elétrica, pneumático, ou hidráulico. Devido aos pesos extremos envolvidos, energia hidráulica é a fonte mais provável para Prime, porque os atuadores hidráulicos fornecem relações peso-potência muito altas (grande saída de energia para pequenas entradas de energia). p Portanto, a energia hidráulica pode permitir que o Prime caminhe, mas o próprio sistema hidráulico criaria um conjunto diferente de problemas. "Um tanque ou reservatório deve ser adicionado para conter o fluido hidráulico, "diz Belote, "As bombas hidráulicas são necessárias; uma fonte de energia secundária deve ser usada para acionar a bomba; as válvulas são necessárias para atender às pressões e taxas de fluxo adequadas." Além disso, um Prime acionado hidraulicamente teria que ser revestido com tubulação para transportar o fluido hidráulico. Esses canos, junto com as linhas de combustível e fiação elétrica do Prime, teria que permanecer intacto ou mesmo intocado durante a transformação. p Depois de sobreviver à transformação para a forma de robô, Prime então teria que andar como um bípede. Belote descreve o que seria necessário para que isso acontecesse:Como os semifinais tradicionais frequentemente excedem 30 toneladas de peso, o peso final do Prime poderia facilmente ficar na faixa de 35 a 40 toneladas. Compare isso com o melhor robô "ambulante" do mundo, O robô ASIMO da Honda, que tem um peso total de 119 libras e ainda só pode andar por cerca de 40 minutos (movido a eletricidade) e a uma velocidade máxima de menos de 2 mph. A proporção de peso para ASIMO é de 2,3 libras por polegada, em comparação com a proporção de peso do Prime, o que provavelmente ultrapassaria 75 a 80 libras por polegada - um aumento de trinta vezes. p Além disso, os robôs não conseguem imitar facilmente o movimento de uma caminhada. "Com um robô, "Belote explica, "há um comando direto (levantar a perna 'x' quantidade, incline para frente a quantidade 'y', estender a perna para baixo, quantidade 'z', e assim por diante). Com humanos, Contudo, não há mecanismo de 'feedback' - seu cérebro não se comunica constantemente com suas pernas sobre onde colocá-lo. Em vez de, você simplesmente se inclina para frente e 'cai, 'colocando sua perna para absorver o choque quando seu pé tocar o chão. " p Portanto, não é provável que possamos ver um Optimus Prime funcionando ou um robô como ele em nossas vidas. Mas já existem robôs que podem mudar de forma ou adquirir qualquer forma. Veremos alguns deles - e como eles se comparam ao Prime - na próxima seção. p
Conteúdo
 O Optimus Prime pode ser um robô bípede e um semi-caminhão. Imagem © 2007 Dreamworks Pictures p A coisa mais legal sobre Transformers, claro, é que eles podem assumir duas formas completamente diferentes. A maioria pode ser robôs bípedes ou veículos de trabalho. Em vez disso, alguns podem se transformar em armas ou dispositivos eletrônicos. As duas formas de um Transformer têm forças e capacidades muito diferentes.
p Isso é completamente diferente da maioria dos robôs reais, que geralmente só são bons em executar uma tarefa ou algumas tarefas relacionadas. Os Rovers de Exploração de Marte, por exemplo, pode fazer o seguinte:
O Optimus Prime pode ser um robô bípede e um semi-caminhão. Imagem © 2007 Dreamworks Pictures p A coisa mais legal sobre Transformers, claro, é que eles podem assumir duas formas completamente diferentes. A maioria pode ser robôs bípedes ou veículos de trabalho. Em vez disso, alguns podem se transformar em armas ou dispositivos eletrônicos. As duas formas de um Transformer têm forças e capacidades muito diferentes.
p Isso é completamente diferente da maioria dos robôs reais, que geralmente só são bons em executar uma tarefa ou algumas tarefas relacionadas. Os Rovers de Exploração de Marte, por exemplo, pode fazer o seguinte:
 Renderização artística de um Mars Exploration Rover na superfície de Marte Imagem cortesia da NASA p Um Exploration Rover não seria muito bom em tarefas que não se encaixassem nessas categorias. Não pode, por exemplo, montar uma ponte, caber em espaços muito pequenos ou construir outros robôs. Em outras palavras, seria um péssimo robô de busca e resgate, e não caberia em uma fábrica automatizada.
Renderização artística de um Mars Exploration Rover na superfície de Marte Imagem cortesia da NASA p Um Exploration Rover não seria muito bom em tarefas que não se encaixassem nessas categorias. Não pode, por exemplo, montar uma ponte, caber em espaços muito pequenos ou construir outros robôs. Em outras palavras, seria um péssimo robô de busca e resgate, e não caberia em uma fábrica automatizada.
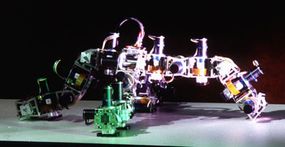
 O Snakebot da NASA é um exemplo de robô em cadeia. Imagem cortesia da NASA
O Snakebot da NASA é um exemplo de robô em cadeia. Imagem cortesia da NASA 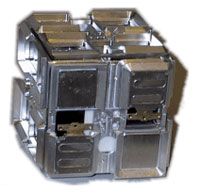 Um módulo Telecube G2 Imagem cortesia do Palo Alto Research Center Incorporated p É por isso que os engenheiros estão desenvolvendo reconfigurando robôs . Como Transformers, esses robôs podem mudar de forma para se adequar à tarefa em questão. Mas em vez de mudar de uma forma para outra, como um robô bípede para um reboque de trator, a reconfiguração de robôs pode assumir muitas formas. Eles são muito menores do que os Transformers reais seriam; algum robô reconfigurando módulos são pequenos o suficiente para caber na mão de uma pessoa.
p Um módulo é essencialmente um pequeno, robô relativamente simples ou parte de um robô. Robôs modulares são feitos de muitos desses pequenos, módulos idênticos. Um robô modular pode consistir em alguns módulos ou muitos, dependendo do projeto do robô e da tarefa que ele precisa realizar. Alguns robôs modulares existem atualmente apenas como simulações de computador; outros ainda estão nos estágios iniciais de desenvolvimento. Mas todos eles operam no mesmo princípio básico - muitos pequenos robôs podem se combinar para criar um grande.
p Os módulos não podem fazer muito por si próprios. Um sistema de reconfiguração também deve ter:
Um módulo Telecube G2 Imagem cortesia do Palo Alto Research Center Incorporated p É por isso que os engenheiros estão desenvolvendo reconfigurando robôs . Como Transformers, esses robôs podem mudar de forma para se adequar à tarefa em questão. Mas em vez de mudar de uma forma para outra, como um robô bípede para um reboque de trator, a reconfiguração de robôs pode assumir muitas formas. Eles são muito menores do que os Transformers reais seriam; algum robô reconfigurando módulos são pequenos o suficiente para caber na mão de uma pessoa.
p Um módulo é essencialmente um pequeno, robô relativamente simples ou parte de um robô. Robôs modulares são feitos de muitos desses pequenos, módulos idênticos. Um robô modular pode consistir em alguns módulos ou muitos, dependendo do projeto do robô e da tarefa que ele precisa realizar. Alguns robôs modulares existem atualmente apenas como simulações de computador; outros ainda estão nos estágios iniciais de desenvolvimento. Mas todos eles operam no mesmo princípio básico - muitos pequenos robôs podem se combinar para criar um grande.
p Os módulos não podem fazer muito por si próprios. Um sistema de reconfiguração também deve ter:
As simulações de computador são uma parte vital da pesquisa robótica, particularmente com a reconfiguração de robôs. Os cientistas usam computadores para descobrir como os módulos se moverão em relação uns aos outros antes de ensinar aos módulos como fazer isso. Em alguns casos, as simulações de computador existem muito antes dos robôs reais. O Laboratório Rus Robotics do Instituto de Tecnologia de Massachusetts (MIT) tem inúmeras simulações de como esses robôs se movem.
 Os módulos de moléculas do Rus Robotics Laboratory apresentam dois cubos conectados em um ângulo de 90 graus. Uma superfície em cada cubo abriga a ligação que o conecta à outra metade do módulo. As outras cinco superfícies podem ser anexadas a outros módulos. Imagem cortesia de Keith Kotay / Rus Robotics Laboratory p A ideia básica de um robô treliça são enxames de pequenos, módulos idênticos que podem se combinar para formar um robô maior. Vários protótipos de robôs treliçados já existem, mas alguns modelos existem apenas como simulações de computador. Robôs treliçados se movem rastejando uns sobre os outros, anexar e desconectar de pontos de conexão em robôs vizinhos. É como a maneira como as peças se movem em um quebra-cabeça de peças deslizantes. Este método de movimento é chamado reconfiguração de substrato - os robôs podem se mover apenas ao longo de pontos dentro da rede de robôs. Módulos de rede podem ter fontes de energia independentes, ou eles podem compartilhar fontes de energia por meio de suas conexões com outros módulos.
p Os robôs treliçados podem se mover em terrenos difíceis escalando uns sobre os outros, seguindo a forma do terreno, ou podem formar um sólido, superfície estável para suportar outras estruturas. Robôs treliçados suficientes podem criar praticamente qualquer forma. Simulações de computador os mostram mudando de uma pilha de peças para uma xícara de chá e de um cachorro para um sofá. Os módulos podem se combinar para formar superfícies planas, escadas, apêndices móveis e virtualmente qualquer outra forma imaginável. Portanto, um robô de treliça é mais parecido com um Terminator T-1000 do que com um Transformer.
Os módulos de moléculas do Rus Robotics Laboratory apresentam dois cubos conectados em um ângulo de 90 graus. Uma superfície em cada cubo abriga a ligação que o conecta à outra metade do módulo. As outras cinco superfícies podem ser anexadas a outros módulos. Imagem cortesia de Keith Kotay / Rus Robotics Laboratory p A ideia básica de um robô treliça são enxames de pequenos, módulos idênticos que podem se combinar para formar um robô maior. Vários protótipos de robôs treliçados já existem, mas alguns modelos existem apenas como simulações de computador. Robôs treliçados se movem rastejando uns sobre os outros, anexar e desconectar de pontos de conexão em robôs vizinhos. É como a maneira como as peças se movem em um quebra-cabeça de peças deslizantes. Este método de movimento é chamado reconfiguração de substrato - os robôs podem se mover apenas ao longo de pontos dentro da rede de robôs. Módulos de rede podem ter fontes de energia independentes, ou eles podem compartilhar fontes de energia por meio de suas conexões com outros módulos.
p Os robôs treliçados podem se mover em terrenos difíceis escalando uns sobre os outros, seguindo a forma do terreno, ou podem formar um sólido, superfície estável para suportar outras estruturas. Robôs treliçados suficientes podem criar praticamente qualquer forma. Simulações de computador os mostram mudando de uma pilha de peças para uma xícara de chá e de um cachorro para um sofá. Os módulos podem se combinar para formar superfícies planas, escadas, apêndices móveis e virtualmente qualquer outra forma imaginável. Portanto, um robô de treliça é mais parecido com um Terminator T-1000 do que com um Transformer.
p Os laboratórios de robótica criaram e teorizaram vários sistemas robóticos de rede:
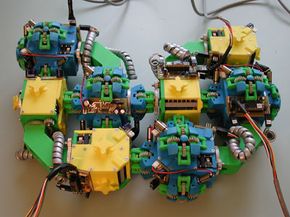
 Swarm-bots podem manobrar independentemente, ou eles podem se combinar para completar tarefas que não poderiam realizar sozinhos. Imagem cortesia do Professor Marco Dorigo p Como robôs treliçados, robôs de reconfiguração móvel são pequenos, módulos idênticos que podem se combinar para formar robôs maiores. Contudo, eles não precisam da ajuda de seus vizinhos para ir de um lugar para outro - eles podem se mover por conta própria. Os robôs de configuração móvel são muito parecidos com representações de cardumes de peixes ou bandos de pássaros que se combinam para criar uma ferramenta ou estrutura. Eles se movem independentemente até que precisem se unir para realizar uma tarefa específica. Swarm-bots , um projeto do programa Future and Emerging Technologies na União Europeia, são robôs de reconfiguração móvel.
p Mesmo que esses robôs sejam muito diferentes uns dos outros, eles têm muitas semelhanças na forma como se movem e operam. Veremos isso a seguir.
Um transformador realmente real
Swarm-bots podem manobrar independentemente, ou eles podem se combinar para completar tarefas que não poderiam realizar sozinhos. Imagem cortesia do Professor Marco Dorigo p Como robôs treliçados, robôs de reconfiguração móvel são pequenos, módulos idênticos que podem se combinar para formar robôs maiores. Contudo, eles não precisam da ajuda de seus vizinhos para ir de um lugar para outro - eles podem se mover por conta própria. Os robôs de configuração móvel são muito parecidos com representações de cardumes de peixes ou bandos de pássaros que se combinam para criar uma ferramenta ou estrutura. Eles se movem independentemente até que precisem se unir para realizar uma tarefa específica. Swarm-bots , um projeto do programa Future and Emerging Technologies na União Europeia, são robôs de reconfiguração móvel.
p Mesmo que esses robôs sejam muito diferentes uns dos outros, eles têm muitas semelhanças na forma como se movem e operam. Veremos isso a seguir.
Um transformador realmente real Os transformadores não são necessariamente práticos ou mesmo possíveis em grande escala. Mas os engenheiros da Himeji Soft Works desenvolveram um robô em pequena escala que realmente muda de um carro para um bípede e vice-versa. Você pode ver um vídeo deste robô, incluindo sua transformação, no YouTube.
 Os transformadores são autoconscientes e podem tomar decisões por conta própria, mas suas partes móveis não são autônomas. Imagem © 2007 Dreamworks Pictures p Além de seu tamanho e estrutura modular, robôs autoconfiguráveis são diferentes dos Transformers em um aspecto importante. Optimus Prime e outros Transformers são autoconscientes e podem tomar decisões independentes, e eles mantêm seus cérebros em um local dentro de seus corpos. O cérebro de um Transformer controla cada uma de suas partes móveis, e as próprias partes têm pouca ou nenhuma autonomia.
p Na maioria das configurações modulares de robôs, no entanto, cada módulo tem algum poder de tomada de decisão e ajuda a descobrir para onde vai. Em vez de um módulo ser o chefe de todos os outros, as capacidades de planejamento e movimentação são distribuído em todos os módulos.
Os transformadores são autoconscientes e podem tomar decisões por conta própria, mas suas partes móveis não são autônomas. Imagem © 2007 Dreamworks Pictures p Além de seu tamanho e estrutura modular, robôs autoconfiguráveis são diferentes dos Transformers em um aspecto importante. Optimus Prime e outros Transformers são autoconscientes e podem tomar decisões independentes, e eles mantêm seus cérebros em um local dentro de seus corpos. O cérebro de um Transformer controla cada uma de suas partes móveis, e as próprias partes têm pouca ou nenhuma autonomia.
p Na maioria das configurações modulares de robôs, no entanto, cada módulo tem algum poder de tomada de decisão e ajuda a descobrir para onde vai. Em vez de um módulo ser o chefe de todos os outros, as capacidades de planejamento e movimentação são distribuído em todos os módulos.
p Esta ideia - um enxame de pequenos robôs, cada um deles decide para onde vai - pode parecer desastroso. Mas os módulos são programados com um conjunto de regras baseadas na geometria sobre como se mover. Eles também são programados com algoritmos que controlam seu movimento. Esses algoritmos e regras permitem que os robôs descubram como mudar de uma forma para outra e se mover pelo terreno. p Para manobras muito complexas, os robôs, em vez disso, planejam uma série de subformas em vez de tentar fazer uma grande mudança em uma única etapa. Por exemplo, um robô de rede que precisa mudar de uma pilha aleatória de módulos para um robô bípede pode primeiro formar as pernas. Então, ele pode usar essas pernas como um andaime para construir a metade superior do robô.
 Atualmente, cada sistema modular de robô tem suas próprias regras para controlar como ele se move e se reconfigura. Imagem cortesia do Palo Alto Research Center Incorporated p Neste momento, muitos desses robôs podem fazer transições simples de uma forma para outra por conta própria. Mudanças mais complexas podem exigir a ajuda de um cientista, tornando a coleção de robôs semi-autônoma em vez de autônoma. Alguns robôs que ainda estão nos estágios iniciais de desenvolvimento recebem todas as instruções de uma estação de trabalho de computador e não tomam decisões por conta própria.
p Atualmente, a maioria dos robôs reconfigurados tem seu próprio sistema de regras e algoritmos, e os conjuntos de regras funcionam apenas para os robôs para os quais foram projetados. Em outras palavras, as regras para o Cristal do Rus Robotics Laboratory não funcionarão com o Molecule.
p Contudo, cientistas estão usando simulações de computador para pesquisar teorias de movimento que poderiam funcionar independentemente da aparência de um módulo robótico. Essas teorias podem estabelecer regras básicas para o movimento do robô, Incluindo:
Atualmente, cada sistema modular de robô tem suas próprias regras para controlar como ele se move e se reconfigura. Imagem cortesia do Palo Alto Research Center Incorporated p Neste momento, muitos desses robôs podem fazer transições simples de uma forma para outra por conta própria. Mudanças mais complexas podem exigir a ajuda de um cientista, tornando a coleção de robôs semi-autônoma em vez de autônoma. Alguns robôs que ainda estão nos estágios iniciais de desenvolvimento recebem todas as instruções de uma estação de trabalho de computador e não tomam decisões por conta própria.
p Atualmente, a maioria dos robôs reconfigurados tem seu próprio sistema de regras e algoritmos, e os conjuntos de regras funcionam apenas para os robôs para os quais foram projetados. Em outras palavras, as regras para o Cristal do Rus Robotics Laboratory não funcionarão com o Molecule.
p Contudo, cientistas estão usando simulações de computador para pesquisar teorias de movimento que poderiam funcionar independentemente da aparência de um módulo robótico. Essas teorias podem estabelecer regras básicas para o movimento do robô, Incluindo:
Enquanto trabalhava neste artigo, a equipe do HowStuffWorks teve uma discussão animada sobre onde os Transformers guardam seus cérebros. Todos nós intuímos a mesma resposta - o cérebro de um Transformer deve estar em sua cabeça (ou em sua cabine na forma de veículo). Muitas histórias em quadrinhos e desenhos animados parecem apoiar essa ideia. Contudo, não explica inteiramente como partes do Optimus Prime podem operar separadamente, a menos que o Prime use sinais de rádio ou infravermelho para enviar e receber comandos. Também não explica inteiramente por que as personalidades dos Constructicons são diferentes das de seus Transformers componentes. Você pode ler mais sobre os cérebros dos Transformers e como eles funcionam no Matrix, uma revista não oficial dos Transformers.














