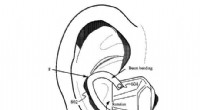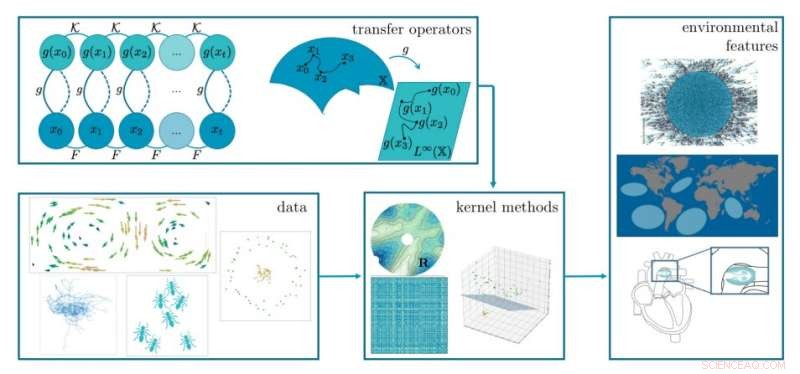
Diagrama de interação entre dados, operadores de transferência, métodos de kernel e recursos ambientais. Operadores de transferência representam sistemas dinâmicos, onde um estado x ∈ X é elevado a um espaço L∞X e g(x) fornece propriedades físicas do sistema. Muitos sistemas são definidos por dados que exibem padrões complexos, como dois anéis aninhados, fluxos em oceanos, trajetórias de táxi e comportamentos biológicos. Os métodos do kernel transformam esses dados em um espaço alternativo com o uso de funções do kernel. Os dados são então mais fáceis de interpretar, como separando dois anéis aninhados ou criando uma matriz Gram para uso em um algoritmo do kernel. Os operadores de transferência são representados por meio de métodos do kernel, incorporando sistemas dinâmicos em um espaço do kernel, algoritmos R. Kernel extraem características ambientais de operadores de transferência, como onde os humanos tendem a se reunir em multidões, áreas de giros em oceanos ou padrões de fluxo sanguíneo em corações . Crédito:Salam, Edwards e Hsieh.
Nos últimos anos, os roboticistas criaram uma variedade de sistemas que poderiam eventualmente operar em ambientes do mundo real. Como a maioria das configurações do mundo real, particularmente os espaços públicos, são dinâmicos e imprevisíveis, para navegar com eficiência nesses ambientes, os robôs devem ser capazes de obter uma boa compreensão de seus arredores.
Pesquisadores do Laboratório GRASP da Universidade da Pensilvânia realizaram recentemente um estudo investigando como os recursos relacionados a um determinado ambiente podem melhorar a consciência de um robô e sua capacidade de navegar pelo ambiente. Seu artigo, pré-publicado no arXiv, foi baseado em dois de seus esforços de pesquisa anteriores.
O primeiro desses estudos anteriores introduziu uma série de estratégias que usaram informações ambientais para aumentar a autonomia de um robô na competição de uma tarefa específica, ou seja, localizar a fonte de um derramamento químico em fluxos turbulentos. Como parte do segundo estudo, por outro lado, a equipe introduziu novas políticas de controle em nível de agente que alavancaram recursos ambientais ou ruído para manter uma distribuição espacial desejada do agente robótico sensor em um ambiente de fluxo geofísico.
"Nossos trabalhos anteriores se concentraram em estruturas coerentes de Lagrangiana, uma característica importante de sistemas dinâmicos em muitas aplicações, como oceanografia e previsão do tempo, e como elas podem ser usadas em robótica", disse Tahiya Salam, um dos pesquisadores que realizaram o estudo. TechXplore. “Nosso novo trabalho se concentra em como um recurso semelhante, conjuntos coerentes, pode ser aprendido on-line e novas abordagens de como esses recursos podem ser usados em aplicações robóticas, como monitoramento de multidões em ambientes urbanos e navegação com eficiência energética na água”.
Em seu novo estudo, Salam e os outros pesquisadores do Laboratório GRASP usaram uma série de técnicas que combinam abordagens de dinâmica global com aprendizado de máquina. Nesse contexto, o termo 'dinâmica global' refere-se à dinâmica geral de um determinado ambiente e às características que caracterizam essa dinâmica.
"A técnica que usamos nos permitiu aprender recursos globais a partir de dados coletados dos ambientes em que os robôs estão operando", explicou Salam. "Os recursos globais, chamados de conjuntos coerentes, têm propriedades interessantes, ou seja, eles representam regiões que se dispersam muito lentamente. Usando essas informações sobre regiões que se dispersam muito lentamente, os robôs podem aproveitar esses recursos para a tomada de decisões."
Salam e seus colegas calcularam esses chamados 'conjuntos coerentes' online usando técnicas de aprendizado de máquina. Posteriormente, eles projetaram uma estrutura que poderia controlar os comportamentos de um robô com base nas características ambientais que eles computavam.
"Encontramos uma maneira de computar conjuntos coerentes em tempo real sem ter informações detalhadas sobre um modelo que descreva o ambiente", explicou Salam. “Além disso, fomos capazes de usar esses conjuntos coerentes de maneiras inteligentes para alcançar comportamentos de robôs inteligentes”.
Salam e seus colegas avaliaram a estrutura que desenvolveram em uma série de experimentos e descobriram que ela superava significativamente os métodos offline para computar recursos ambientais. A equipe demonstrou especificamente a eficácia do modelo desenvolvido em dois cenários onde robôs monitoravam ambientes urbanos e navegavam na água.
No futuro, a estrutura apresentada por essa equipe de pesquisadores poderá ajudar a melhorar a capacidade de robôs existentes e emergentes de navegar em ambientes desconhecidos e dinâmicos. Enquanto isso, Salam planeja explorar ainda mais o potencial do uso de recursos ambientais para aprimorar a navegação do robô.
“Nos meus próximos estudos, continuarei investigando técnicas que conectam dinâmica global e aprendizado de máquina em estruturas mais gerais”, acrescentou Salam. "Por exemplo, gostaria de representar a dinâmica global de ambientes arbitrários a partir de medições de sensores coletadas por robôs."