Crédito:Universidade de Washington
No início da pandemia do COVID-19, empresas fabricantes de automóveis como a Ford rapidamente mudaram seu foco de produção de automóveis para máscaras e ventiladores.
Para tornar essa mudança possível, essas empresas contaram com pessoas trabalhando em uma linha de montagem. Teria sido muito desafiador para um robô fazer essa transição porque os robôs estão vinculados às suas tarefas habituais.
Teoricamente, um robô poderia pegar quase qualquer coisa se suas garras pudessem ser trocadas para cada tarefa. Para manter os custos baixos, essas garras podem ser passivas, o que significa que as garras pegam objetos sem mudar de forma, semelhante à forma como as pinças de uma empilhadeira funcionam.
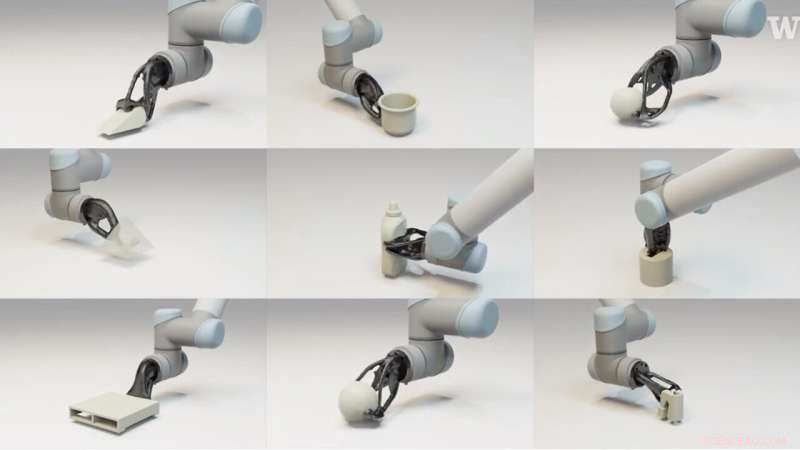
Uma equipe da Universidade de Washington criou uma nova ferramenta que pode projetar uma pinça passiva imprimível em 3D e calcular o melhor caminho para pegar um objeto. A equipe testou esse sistema em um conjunto de 22 objetos – incluindo um coelho impresso em 3D, uma cunha em forma de porta, uma bola de tênis e uma furadeira. As garras e caminhos projetados foram bem sucedidos para 20 dos objetos. Dois deles eram a cunha e uma forma de pirâmide com um buraco de fechadura curvo. Ambas as formas são desafiadoras para vários tipos de garras.
Crédito:Universidade de Washington A equipe apresentará essas descobertas em 11 de agosto no SIGGRAPH 2022.
"Ainda produzimos a maioria de nossos itens com linhas de montagem, que são realmente ótimas, mas também muito rígidas. A pandemia nos mostrou que precisamos ter uma maneira de redirecionar facilmente essas linhas de produção", disse a autora sênior Adriana Schulz, professora assistente da UW. na Escola Paul G. Allen de Ciência da Computação e Engenharia. "Nossa idéia é criar ferramentas personalizadas para essas linhas de fabricação. Isso nos dá um robô muito simples que pode fazer uma tarefa com uma garra específica. E então, quando mudo a tarefa, apenas substituo a garra."
As garras passivas não podem se ajustar ao objeto que estão pegando, então, tradicionalmente, os objetos são projetados para combinar com uma garra específica.
"A pinça passiva de maior sucesso no mundo são as pinças em uma empilhadeira. Mas a desvantagem é que as pinças de empilhadeira só funcionam bem com formas específicas, como paletes, o que significa que qualquer coisa que você queira segurar precisa estar em um palete", disse co-autor Jeffrey Lipton, professor assistente de engenharia mecânica da UW. "Aqui estamos dizendo 'Ok, não queremos predefinir a geometria da garra passiva.' Em vez disso, queremos pegar a geometria de qualquer objeto e projetar uma garra."
Para qualquer objeto, há muitas possibilidades de como sua garra pode parecer. Além disso, a forma da garra está ligada ao caminho que o braço do robô percorre para pegar o objeto. Se projetado incorretamente, uma garra pode colidir com o objeto a caminho de pegá-lo. Para enfrentar esse desafio, os pesquisadores tiveram alguns insights importantes.
"Os pontos onde a garra faz contato com o objeto são essenciais para manter a estabilidade do objeto na preensão. Chamamos esse conjunto de pontos de 'configuração de preensão'", disse o principal autor Milin Kodnongbua, que completou esta pesquisa como estudante de graduação da UW. na Escola Allen. "Além disso, a garra deve entrar em contato com o objeto nesses pontos determinados, e a garra deve ser um único objeto sólido conectando os pontos de contato ao braço do robô. Podemos procurar uma trajetória de inserção que satisfaça esses requisitos."
Ao projetar uma nova garra e trajetória, a equipe começa fornecendo ao computador um modelo 3D do objeto e sua orientação no espaço – como ele seria apresentado em uma esteira rolante, por exemplo.
"Primeiro, nosso algoritmo gera possíveis configurações de captura e as classifica com base na estabilidade e em algumas outras métricas", disse Kodnongbua. "Então ele pega a melhor opção e co-otimiza para descobrir se uma trajetória de inserção é possível. Se não encontrar uma, então ele vai para a próxima configuração de captura na lista e tenta fazer a co-otimização novamente."
Depois que o computador encontra uma boa correspondência, ele gera dois conjuntos de instruções:um para uma impressora 3D criar a garra e outro com a trajetória para o braço do robô, uma vez que a garra é impressa e conectada.
A equipe escolheu uma variedade de objetos para testar o poder do método, incluindo alguns de um conjunto de dados de objetos que são o padrão para testar a capacidade de um robô de realizar tarefas de manipulação.
“Também projetamos objetos que seriam desafiadores para robôs de preensão tradicionais, como objetos com ângulos muito rasos ou objetos com preensão interna – onde você precisa pegá-los com a inserção de uma chave”, disse o coautor Ian Good, um Estudante de doutorado da UW no departamento de engenharia mecânica.
Os pesquisadores realizaram 10 captadores de teste com 22 formas. Para 16 formas, todos os 10 captadores foram bem sucedidos. Embora a maioria das formas tenha pelo menos uma coleta bem-sucedida, duas não. Essas falhas resultaram de problemas com os modelos 3D dos objetos que foram entregues ao computador. Por um lado - uma tigela - o modelo descreveu os lados da tigela como mais finos do que eram. Para o outro – um objeto que parece uma xícara com alça em forma de ovo – o modelo não estava com a orientação correta.
O algoritmo desenvolveu as mesmas estratégias de preensão para objetos de formas semelhantes, mesmo sem qualquer intervenção humana. Os pesquisadores esperam que isso signifique que eles serão capazes de criar garras passivas que podem pegar uma classe de objetos, em vez de ter que ter uma garra única para cada objeto.
Uma limitação desse método é que as garras passivas não podem ser projetadas para pegar todos os objetos. Embora seja mais fácil pegar objetos que variam em largura ou têm bordas salientes, objetos com superfícies uniformemente lisas, como uma garrafa de água ou uma caixa, são difíceis de segurar sem partes móveis.
Ainda assim, os pesquisadores foram encorajados a ver o algoritmo se sair tão bem, especialmente com algumas das formas mais difíceis, como uma coluna com um buraco de fechadura no topo.
"O caminho que nosso algoritmo criou para esse é uma rápida aceleração até onde ele fica muito perto do objeto. Parecia que ia colidir com o objeto, e eu pensei:"Ah, não. E se não o calibrarmos corretamente?'" disse Good. "E então, é claro, ele fica incrivelmente próximo e então o capta perfeitamente. Foi esse momento inspirador, uma montanha-russa extrema de emoção."
Yu Lou, que completou esta pesquisa como aluno de mestrado na Allen School, também é coautor deste artigo.