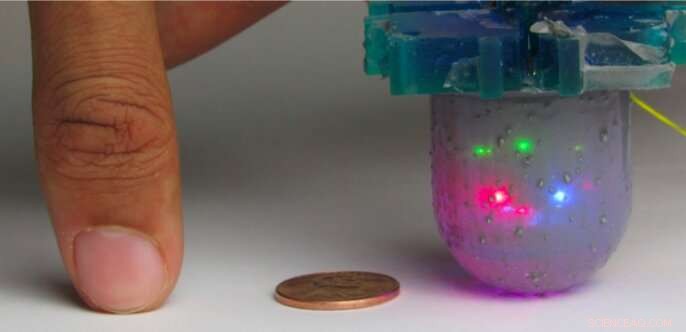
Um polegar humano ao lado do OmniTact e uma moeda americana; mostrando o tamanho do sensor. Crédito:Padmanabha et al.
Nos últimos anos, pesquisadores em todo o mundo vêm tentando desenvolver sensores que possam replicar o sentido do tato dos humanos em robôs e aprimorar suas habilidades de manipulação. Embora alguns desses sensores tenham alcançado resultados notáveis, a maioria das soluções existentes tem pequenos campos sensíveis ou só pode coletar imagens com baixa resolução.
Uma equipe de pesquisadores da UC Berkeley desenvolveu recentemente um novo sensor tátil multidirecional, chamado OmniTact, que supera algumas das limitações dos sensores desenvolvidos anteriormente. OmniTact, apresentado em artigo pré-publicado no arXiv e previsto para apresentação no ICRA 2020, atua como uma ponta de dedo artificial que permite aos robôs sentir as propriedades dos objetos que estão segurando ou manipulando.
"Nosso laboratório reconheceu a necessidade de um sensor para tarefas gerais de manipulação robótica com recursos expandidos do que os sensores táteis atuais, "Frederik Ebert, um dos pesquisadores que realizou o estudo, disse TechXplore. '"Os sensores táteis existentes são planos, têm pequenos campos sensíveis ou fornecem apenas sinais de baixa resolução. Por exemplo, o sensor GelSight fornece alta resolução (ou seja, 400x400 pixels), mas é grande e plana, fornecendo sensibilidade em apenas um lado, enquanto o sensor OptoForce é curvo, mas só fornece leituras de força em um único ponto. "
OmniTact, o sensor desenvolvido por Ebert e seus colegas, é uma adaptação do GelSight, um sensor tátil criado por pesquisadores do MIT e da UC Berkeley. O GelSight pode gerar mapas 3D detalhados da superfície de um objeto e detectar algumas de suas características.
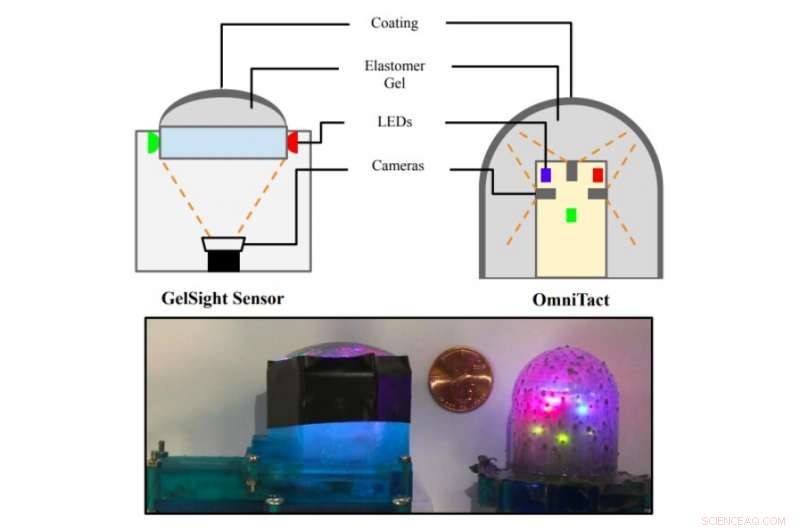
Uma ilustração e imagem explicando as diferenças básicas entre o sensor GelSight e o OmniTact. Crédito:Padmanabha et al.
Em contraste com o GelSight, OmniTact é multidirecional, o que significa que todos os seus lados têm capacidades de detecção. Além disso, pode fornecer leituras de alta resolução, é altamente compacto e tem uma forma curva. Quando integrado a uma garra ou mão robótica, o sensor atua como um dedo artificial sensível, "permitindo que o robô manipule e detecte uma ampla gama de objetos de formas e tamanhos variados.
OmniTact foi construído incorporando várias microcâmeras em uma pele artificial feita de gel de silicone. As câmeras detectam deformações multidirecionais da pele à base de gel, produzindo um sinal rico que pode então ser analisado por visão computacional e técnicas de processamento de imagem para inferir informações sobre os objetos que um robô está manipulando.
"Nossa equipe usa abordagens baseadas em aprendizagem para fazer uso do feedback de alta resolução e evitar procedimentos de calibração manual, "Akhil Padmanabha, outro pesquisador envolvido no estudo, disse TechXplore. "OmniTact fornece detecção de toque em todos os lados do sensor, permitindo assim que os robôs tenham acesso a feedback tátil enquanto fazem contato com objetos em qualquer direção. "
Ebert, Padmanabha e seus colegas avaliaram o desempenho de seu sensor em uma tarefa bastante desafiadora, onde um robô teve que inserir um conector elétrico em uma tomada. Eles também testaram sua capacidade de inferir o ângulo de contato de um dedo ao ser pressionado contra um determinado objeto. Nessas avaliações iniciais, OmniTact obteve resultados notáveis, superando tanto um sensor tátil que é sensível apenas em um lado e outro sensor multidirecional na tarefa de estimativa de estado.
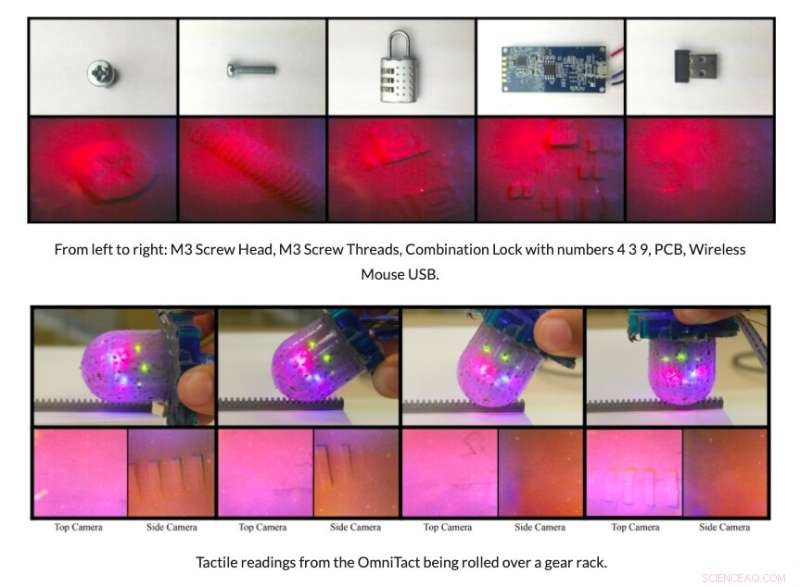
Crédito:Padmanabha et al.
"Por meio de nossos experimentos com OmniTact, descobrimos que multidirecional, o sensor tátil de alta resolução permite certas tarefas de manipulação de baixa granularidade, como a tarefa de inserção de conector que apresentamos, "Stephen Tian, outro pesquisador envolvido no estudo, disse TechXplore. "Suspeitamos que, no futuro, a detecção tátil multidirecional poderia ser um elemento essencial na manipulação robótica de uso geral, além de aplicações como a teleoperação robótica em cirurgia, bem como em missões marítimas e espaciais. "
Os pesquisadores construíram seu sensor usando microcâmeras que são normalmente usadas em endoscópios, lançar o gel de silicone diretamente nas câmeras. Como resultado, OmniTact é muito mais compacto do que os sensores GelSight desenvolvidos anteriormente e, portanto, poderia ter uma gama mais ampla de aplicações possíveis. No futuro, pode abrir caminho para a criação de novos robôs com capacidades de detecção mais sofisticadas.
"Pretendemos tornar o OmniTact mais barato e mais compacto, permitindo que seja usado em uma ampla gama de tarefas. Nossa equipe também planeja conduzir mais pesquisas de manipulação robótica que informarão as futuras gerações de sensores táteis, "Padmanabha disse.
© 2020 Science X Network














