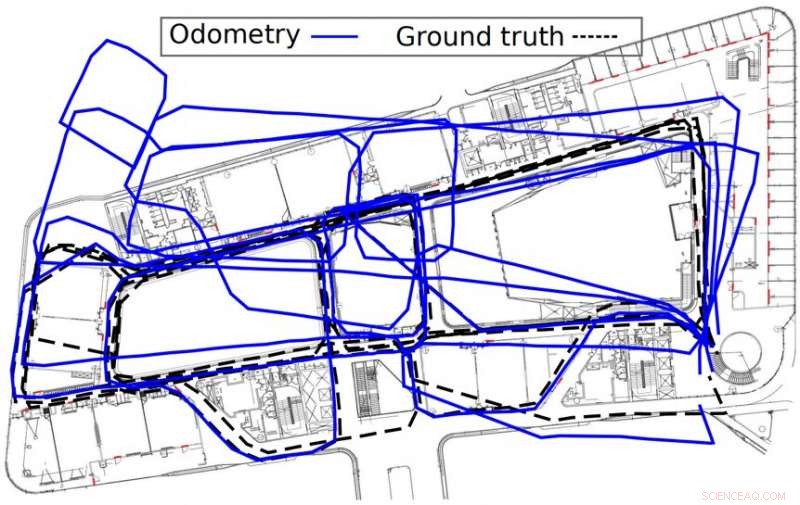
Figura que mostra como as abordagens da verdade terrestre se comparam às técnicas de odometria. Crédito:Liu et al.
Nos últimos anos, equipes de pesquisa em todo o mundo desenvolveram novos métodos de localização e mapeamento simultâneos (SLAM). Essas técnicas podem ser usadas para construir ou atualizar mapas de um determinado ambiente em tempo real, ao mesmo tempo em que rastreia um agente artificial ou a localização do robô dentro desses mapas.
A maioria das abordagens SLAM existentes dependem fortemente do uso de sensores baseados em alcance ou visão, para sentir o ambiente e os movimentos de um robô. Esses sensores, Contudo, pode ser muito caro e normalmente requer uma capacidade computacional significativa para operar corretamente.
Ciente dessas limitações, pesquisadores da Universidade de Tecnologia e Design de Cingapura, Southwest University of Science and Technology, a Universidade de Moratuwa e a Universidade Tecnológica de Nanyang desenvolveram recentemente uma nova técnica para SLAM colaborativo que depende de sensores baseados em alcance ou visão. Esta técnica, apresentado em um artigo pré-publicado no arXiv, poderia permitir uma navegação de robô mais eficaz em ambientes internos desconhecidos a um custo significativamente menor do que a maioria dos métodos propostos anteriormente.
"Nosso objetivo era utilizar sensores computacionais de baixo custo e baixo como uma substituição para sensores baseados em alcance ou visuais, "Chau Yuen, um dos pesquisadores que realizou o estudo, disse TechXplore. "Como os edifícios modernos geralmente têm cobertura de rede Wi-Fi, nosso objetivo é utilizar essas informações disponíveis gratuitamente para realizar SLAM. "
Para explorar os recursos de rádio que estão disponíveis na maioria dos ambientes urbanos, os pesquisadores desenvolveram uma abordagem para localização colaborativa simultânea e mapeamento de impressão digital por rádio chamada C-SLAM-RF. Sua técnica funciona através do crowdsensing de medições de Wi-Fi em grandes ambientes internos e, em seguida, usando essas medições para gerar mapas ou localizar agentes artificiais.
"Nosso objetivo é gerar um mapa de rádio do meio ambiente com o mínimo esforço humano possível, aproveitando os recursos de detecção embutidos de smartphones comumente usados, "Yuen explicou.
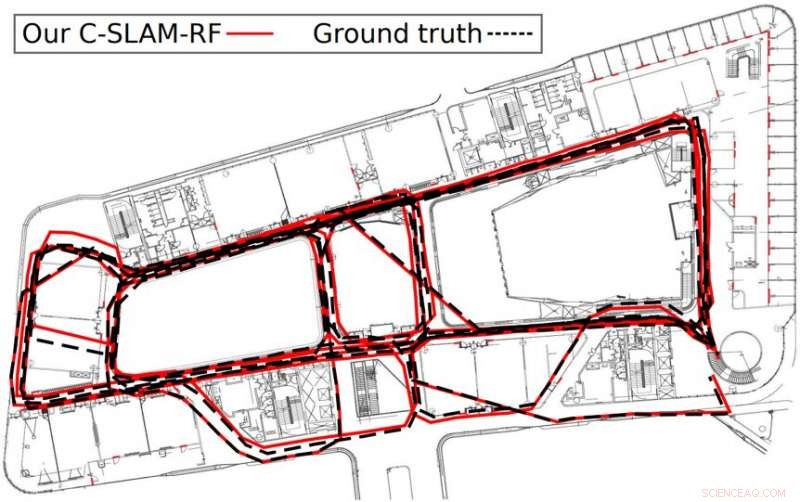
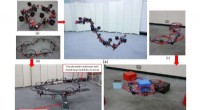
Figura mostrando como as abordagens do caminho estimado se comparam à técnica SLAM desenvolvida pelos pesquisadores. Crédito:Liu et al.
O sistema desenvolvido por Yuen e seus colegas recebe informações sobre a força do sinal proveniente de pontos de acesso Wi-Fi pré-existentes espalhados por um determinado ambiente, bem como de processos de cálculo de mortos de pedestres (PDR) (ou seja, cálculos da posição atual de alguém) derivados de um smartphone. Em seguida, usa esses sinais para construir um mapa do ambiente sem exigir conhecimento prévio do ambiente ou da distribuição dos pontos de acesso dentro dele. A ferramenta C-SLAM-RF idealizada pelos pesquisadores também pode determinar se o robô retornou a um local visitado anteriormente, conhecido como "fechamento de loop, "avaliando a semelhança entre as impressões digitais de rádio dos diferentes sinais.
"As abordagens SLAM existentes costumam usar dispositivos dedicados, por exemplo, câmeras visuais ou sensores LIDAR baseados em alcance, para medir a semelhança de observações por correspondência de varredura ou correspondência de características, que são computacionalmente caros, "U-Xuan Tan, outro pesquisador envolvido no estudo, disse TechXplore. “Nossa solução explora a possibilidade de realizar localização e mapeamento com baixo custo, dispositivos IoT onipresentes, como smartphones, devido à crescente popularidade das redes sem fio Wi-Fi. "
Yuen, Tan e seus colegas testaram sua técnica em um ambiente interno com uma área de 130 metros x 70 metros. Seus resultados foram altamente promissores, como o desempenho de seu sistema excedeu o de várias outras técnicas existentes para SLAM, frequentemente por uma margem considerável.
"Avaliamos nossa abordagem em um ambiente de grande escala e uma precisão de posicionamento de 0,6 metros é alcançada sem qualquer conhecimento prévio do ambiente, "Ran Liu, outro pesquisador envolvido no estudo, disse TechXplore. "Esta precisão supera a abordagem de localização baseada em impressões digitais de última geração, o que requer um levantamento tedioso do meio ambiente. O tempo computacional exigido por nossa abordagem é insignificante quando comparado ao SLAM baseado em alcance ou visual. "
No futuro, a abordagem para SLAM colaborativo desenvolvida por esta equipe de pesquisadores pode ajudar a melhorar a navegação do robô em ambientes desconhecidos. Além disso, o fato de não exigir o uso de sensores caros e depender de pontos de acesso Wi-Fi existentes torna-o uma solução mais viável para implementações em grande escala.
"Gostaríamos agora de explorar a possibilidade de fundir diferentes sinais de rádio, por exemplo, sinal de celular, para melhorar a precisão do posicionamento, "Yong Liang Guan, outro pesquisador envolvido no estudo, disse TechXplor. "Outro plano é usar o mapa de rádio produzido para fins de localização. Uma combinação com outros sensores, por exemplo telêmetros a laser, para acelerar e melhorar o mapeamento em ambientes de grande escala também será uma de nossas pesquisas futuras."
© 2020 Science X Network