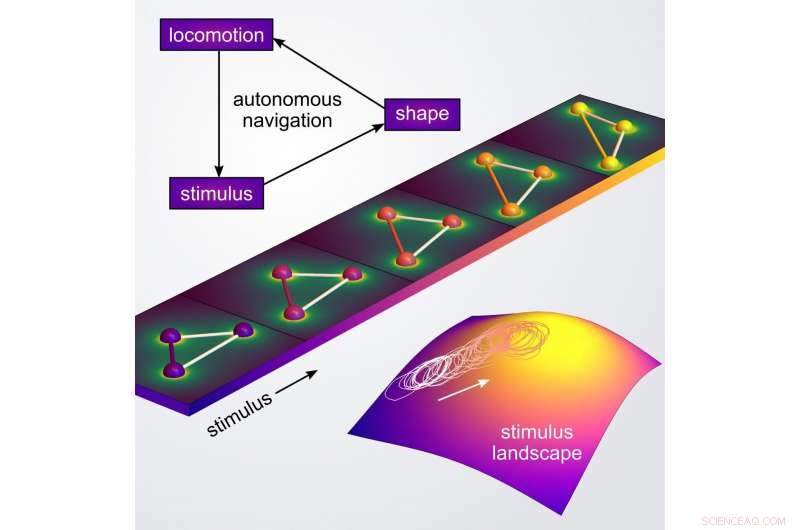
Um esquema do mecanismo de navegação autônomo por meio de mudança de forma Crédito:Yong Dou / Columbia Engineering
A maioria dos materiais sintéticos, incluindo aqueles em eletrodos de bateria, membranas de polímero, e catalisadores, degradam com o tempo porque não possuem mecanismos internos de reparo. Se você pudesse distribuir microrrobôs autônomos dentro desses materiais, então, você poderia usar os microrrobôs para fazer reparos internos continuamente. Um novo estudo do laboratório de Kyle Bishop, professor associado de engenharia química, propõe uma estratégia para robôs em microescala que podem detectar sintomas de um defeito de material e navegar autonomamente até o local do defeito, onde ações corretivas podem ser executadas. O estudo foi publicado em Pesquisa de revisão física 2 de dezembro 2019.
Bactérias nadadoras procuram regiões de alta concentração de nutrientes integrando sensores químicos e motores moleculares, muito parecido com um carro que dirige sozinho que usa informações de câmeras e outros sensores para selecionar uma ação apropriada para chegar ao seu destino. Os pesquisadores tentaram imitar esses comportamentos usando pequenas partículas impulsionadas por combustíveis químicos ou outras entradas de energia. Embora variações espaciais no ambiente (por exemplo, na concentração de combustível) pode atuar para orientar fisicamente a partícula e, assim, direcionar seu movimento, este tipo de navegação tem limitações.
"As partículas autopropelidas existentes são mais como um trem desgovernado que é mecanicamente dirigido por trilhos sinuosos do que um carro autônomo que é guiado de forma autônoma por informações sensoriais, "diz Bishop." Nós nos perguntamos se poderíamos projetar robôs em microescala com sensores de materiais e atuadores que navegam mais como bactérias. "
A equipe de Bishop está desenvolvendo uma nova abordagem para codificar a navegação autônoma de microrrobôs baseada em materiais que mudam de forma. Características locais do ambiente, como temperatura ou pH, determinar a forma tridimensional da partícula, que por sua vez influencia seu movimento autopropulsionado. Ao controlar a forma da partícula e sua resposta às mudanças ambientais, os pesquisadores modelam como os microrrobôs podem ser projetados para nadar para cima ou para baixo em gradientes de estímulo, mesmo aqueles muito fracos para serem sentidos diretamente pela partícula.
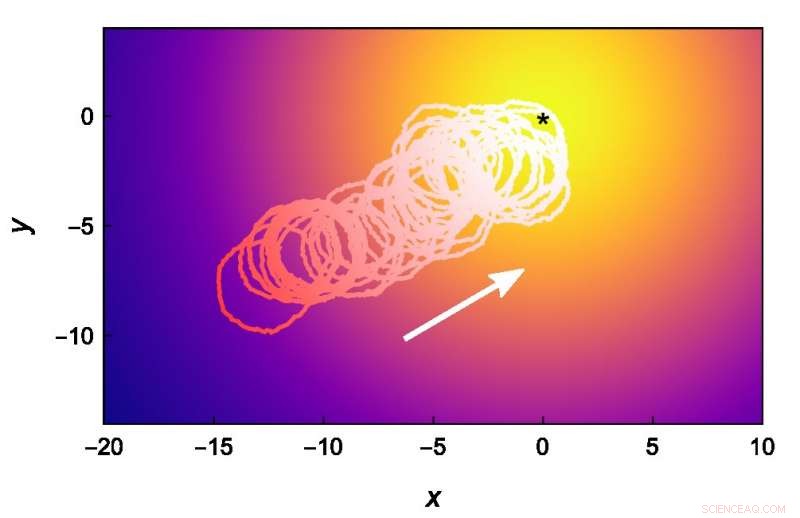
Trajetória de navegação simulada em ambientes de ruído e complexos. Crédito:Yong Dou / Columbia Engineering
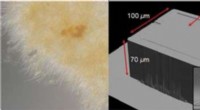
"Pela primeira vez, mostramos como materiais responsivos podem ser usados como computadores de bordo para robôs em microescala, menor do que a espessura de um cabelo humano, que são programados para navegar de forma autônoma, "diz Yong Dou, um co-autor do estudo e um Ph.D. estudante no laboratório de Bishop. "Esses microrrobôs podem realizar tarefas mais complexas, como detecção distribuída de defeitos de material, entrega autônoma de carga terapêutica, e reparos de materiais sob demanda, células, ou tecidos. "
A equipe de Bishop está agora preparando experimentos para demonstrar na prática sua estratégia teórica de navegação para microrrobôs, usando materiais que mudam de forma, como elastômeros de cristal líquido e ligas com memória de forma. Eles esperam mostrar que os experimentos provarão que os estímulos-responsivos, micropartículas que mudam de forma podem usar feedback de engenharia entre detecção e movimento para navegar de forma autônoma.