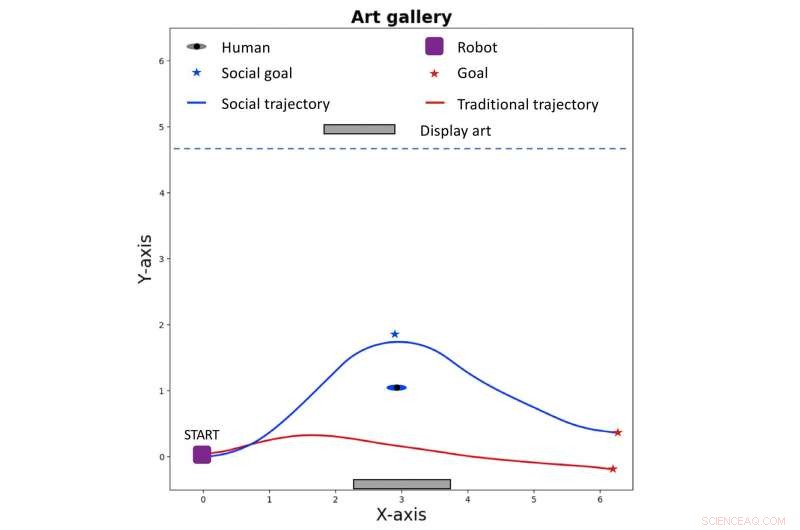
Um robô móvel levando em consideração o espaço de atividade em uma galeria de arte, onde o robô com planejador SAN evita entrar no espaço de atividade, representado pela trajetória azul. Crédito:Banisetty et al.
Os robôs móveis estão gradualmente abrindo caminho em uma série de ambientes povoados por humanos, incluindo hospitais, shoppings e casas das pessoas. Para que esses robôs interajam com os humanos ao seu redor, eles devem respeitar uma série de normas sociais implícitas que estão associadas ao compartilhamento de um determinado ambiente com outras pessoas.
Com isso em mente, pesquisadores da Universidade de Nevada, Reno desenvolveu recentemente um não linear, abordagem de otimização multi-objetivo que pode permitir a navegação com consciência social em robôs móveis. Esta abordagem, descrito pela primeira vez em um artigo apresentado na Conferência Internacional de Robôs e Sistemas (IROS) de 2018 e agora publicado no arXiv, garante que os robôs não invadam o espaço pessoal dos humanos ao seu redor, ao mesmo tempo que permite interações homem-robô (HRIs) mais eficazes em vários cenários.
"Esta pesquisa começou inicialmente como parte do meu trabalho de dissertação com robôs e crianças, "David Feil-Seifer, um dos pesquisadores que realizou o estudo, disse TechXplore. "O trabalho anterior envolveu o desenvolvimento de um robô para ambientes onde queríamos um robô para interagir com as crianças. Neste caso, fizemos com que o robô tomasse o caminho mais "eficiente" pelas métricas que são comumente usadas no planejamento do caminho do robô (minimizando o tempo para um movimento, minimizando a distância percorrida, não acertar nada). "
Em um estudo anterior publicado no Journal of Human-Robot Interaction , Feil-Seifer e seus colegas tentaram desenvolver comportamentos de navegação de robôs para ambientes habitados por crianças. O trabalho piloto mostrou que o robô foi eficaz em alcançar o local desejado sem bater em nada, mas os pesquisadores observaram que as crianças normalmente reagiam mal ao robô.
Na verdade, o robô usado em seus experimentos geralmente se afastava das crianças e se movia o mais rápido possível em direção ao local desejado. Como consequência desse comportamento, as crianças pensaram que o robô não queria interagir com elas.
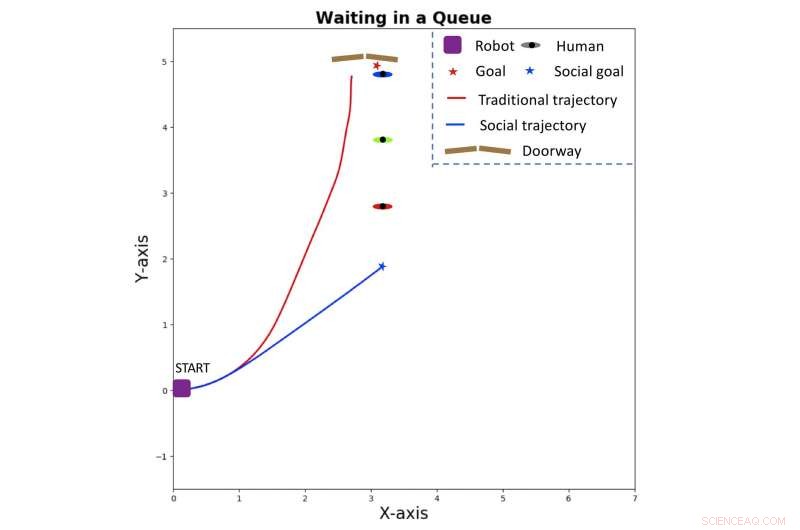
Um robô móvel está se juntando a uma sugestão, formado na frente de um cenário de entrada. O planejador tradicional gerou a trajetória vermelha, guiar o robô para um local ao lado da primeira pessoa (inadequado), cortando a linha. A trajetória azul, nossa abordagem proposta, levando o robô para se juntar à linha (apropriado). Crédito:Banisetty et al.
"Observamos o robô e vimos que ele não estava realmente se movendo como uma pessoa, pegando informações sociais e usando isso para ajudar no planejamento de seu caminho, "Feil-Seifer disse." Portanto, decidimos fazer um planejador de navegação que pode usar informações de distância social para executar movimentos socialmente adequados. "
No mesmo estudo anterior, Feil-Seifer e seus colegas permitiram com sucesso que o robô determinasse se um movimento planejado era socialmente apropriado usando um método matemático simples chamado modelos de mistura gaussiana (GMMs). Este método funcionou bem em situações onde os fatores sociais podiam ser facilmente compreendidos e representados usando um modelo matemático linear simples.
Como a maioria das interações sociais do mundo real envolve vários fatores que são difíceis de encaixar em um modelo linear, Contudo, o método simples que desenvolveram não generalizaria bem em diferentes situações sociais, e em muitos casos, não funcionaria de todo. Em seu novo estudo, os pesquisadores decidiram então atualizar o planejador que desenvolveram anteriormente, a fim de otimizar os movimentos planejados do robô, levando em consideração as relações não lineares entre as várias propriedades sociais que eles queriam que o robô considerasse. Isso envolveu o uso de um planejador habilitado para transformação de eliminação de concavidade de Pareto (PaCcET).
"As principais vantagens de nossa abordagem é que ela pode levar essas relações não lineares entre os vários fatores sociais (ou seja, onde você está em um corredor, onde você está em relação a outras pessoas, quão perto você está de seu objetivo, etc.) em consideração, "Feil-Seifer disse.
Feil-Seifer e seus colegas aplicaram sua abordagem de otimização não linear a vários cenários em que um robô tinha que respeitar as normas sociais, por exemplo, por não invadir o espaço pessoal das pessoas. Eles descobriram que sua abordagem funcionou bem em muitos desses cenários, incluindo interações em um corredor, em uma galeria de arte ou enquanto espera por uma deixa.
"Ainda não fizemos uma comparação direta com outros planejadores de navegação socialmente conscientes; isso está planejado para o futuro, "Feil-Seifer disse." No entanto, em comparação com um planejador tradicional que não considera a dinâmica social, o robô dá a uma pessoa muito mais espaço ao passar por ela no corredor, ao mesmo tempo em que continua a prosseguir em direção a uma meta desejada. "
Em seu estudo recente, os pesquisadores avaliaram sua abordagem em simulações 2-D em um robô PR2 simulado e no mundo real em um robô móvel pioneiro 3DX. Suas descobertas sugerem que sua abordagem pode lidar com vários cenários de interação envolvendo robôs holonômicos e não holonômicos.
"Praticamente, este artigo inicial demonstra que este método pode funcionar, pelo menos em um ambiente simulado, "Feil-Seifer disse." Trabalhos posteriores demonstraram isso no mundo real e em uma ampla gama de cenários sociais que consideram outras pessoas e fatores relacionados ao ambiente do robô (ou seja, locais de interesse, como pinturas em uma parede) que também se relacionam com ser socialmente consciente. "
Geral, o trabalho realizado por Feil-Seifer e seus colegas destaca a necessidade de desenvolver ferramentas que tornem os robôs mais socialmente conscientes, de forma a garantir que eles não incomodem as pessoas e, assim, facilitem sua integração na sociedade. No futuro, a abordagem de otimização não linear que desenvolveram poderia, em última análise, simplificar a adoção de robôs móveis em escritórios, hospitais e uma variedade de outros ambientes.
"Agora estamos continuando a estender as capacidades de nosso planejador de navegação com consciência social (SAN) para incluir uma gama mais ampla de interações sociais para entender melhor o contexto social para que possa decidir adequadamente quais objetivos priorizar, e para fazer o sistema funcionar de maneira mais robusta, "Feil-Seifer disse." Também estamos planejando estudar os efeitos diretos que a navegação socialmente consciente tem sobre as pessoas que observam a interação e como isso afeta suas percepções do robô, pois isso ajudaria a validar a necessidade de uma navegação socialmente consciente. "
© 2019 Science X Network