 p Crédito:University of Bristol
p Crédito:University of Bristol
p Em uma nova reviravolta na pesquisa de robôs humanos, cientistas da computação da Universidade de Bristol desenvolveram um robô portátil que primeiro prevê e depois frustra os usuários ao se rebelar contra seus planos, demonstrando assim uma compreensão da intenção humana. p Em um mundo cada vez mais tecnológico, a cooperação entre humanos e máquinas é um aspecto essencial da automação. Esta nova pesquisa mostra que frustrar pessoas propositalmente faz parte do processo de desenvolvimento de robôs que cooperam melhor com os usuários.
p A equipe de Bristol desenvolveu-se inteligente, Robôs portáteis que completam tarefas em colaboração com o usuário. Em contraste com as ferramentas elétricas convencionais, que não sabem nada sobre as tarefas que executam e estão totalmente sob o controle dos usuários, o robô portátil detém conhecimento sobre a tarefa e pode ajudar por meio de orientação, movimento ajustado e decisões sobre sequências de tarefas.
p Embora isso ajude a cumprir tarefas mais rapidamente e com maior precisão, os usuários podem ficar irritados quando as decisões do robô não estão de acordo com seus próprios planos.
p Última pesquisa neste espaço por Ph.D. candidato Janis Stolzenwald e Professor Walterio Mayol-Cuevas, do Departamento de Ciência da Computação da University of Bristol, explora o uso de ferramentas inteligentes que podem influenciar suas decisões em resposta à intenção dos usuários.
p Esta pesquisa é uma reviravolta interessante na pesquisa de robôs humanos, pois visa primeiro prever o que os usuários desejam e depois ir contra esses planos.
p O professor Mayol-Cuevas disse:"Se você está frustrado com uma máquina que foi feita para ajudá-lo, isso é mais fácil de identificar e medir do que os sinais frequentemente evasivos de cooperação entre humanos e robôs. Se o usuário ficar frustrado quando instruímos o robô a se rebelar contra seus planos, sabemos que o robô entendeu o que eles queriam fazer. "
p "Assim como as previsões de curto prazo das ações uns dos outros são essenciais para o sucesso do trabalho em equipe humano, nossa pesquisa mostra que a integração dessa capacidade em sistemas robóticos cooperativos é essencial para o sucesso da cooperação homem-máquina. "
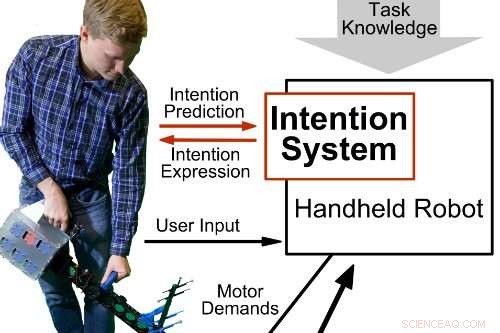
p Para o estudo, os pesquisadores usaram um protótipo que pode rastrear o olhar do usuário e obter previsões de curto prazo sobre as ações pretendidas por meio do aprendizado de máquina. Esse conhecimento é então usado como base para as decisões do robô, como para onde se mover a seguir.
p A equipe de Bristol treinou o robô no estudo usando um conjunto de mais de 900 exemplos de treinamento a partir de uma tarefa de escolher e colocar realizada pelos participantes.
p O núcleo desta pesquisa é a avaliação do modelo de previsão de intenção. Os pesquisadores testaram o robô em dois casos:obediência e rebelião. O robô foi programado para seguir ou desobedecer a intenção prevista do usuário. Conhecer os objetivos do usuário deu ao robô o poder de se rebelar contra suas decisões. A diferença nas respostas de frustração entre as duas condições serviu como evidência da precisão das previsões do robô, validando assim o modelo de previsão de intenção.
p Janis Stolzenwald, um Ph.D. estudante patrocinado pela German Academic Scholarship Foundation e pelo EPSRC do Reino Unido, conduziu os experimentos do usuário e identificou novos desafios para o futuro. Ele disse:"Descobrimos que o modelo de intenção é mais eficaz quando os dados do olhar são combinados com o conhecimento da tarefa. Isso levanta uma nova questão de pesquisa:como o robô pode recuperar esse conhecimento? Podemos imaginar aprender através da demonstração ou envolver outro ser humano no tarefa."
p Em preparação para este novo desafio, os pesquisadores estão explorando o controle compartilhado, interação e novas aplicações em seus estudos sobre colaboração remota por meio do robô portátil. Uma tarefa de manutenção serve como um experimento do usuário, onde um usuário de robô portátil recebe assistência por meio de um especialista que controla o robô remotamente.
p A pesquisa baseia-se no robô portátil projetado e construído pelo ex-Ph.D. estudante Austin Gregg-Smith, e que está disponível como um design de código aberto no site do pesquisador em www.handheldrobotics.org.