Aqueles que sabem como é difícil segurar as mãos de um robô, manobrar e manobrar farão mais do que olhar - olhar, em vez disso - no vídeo recente que mostra o cubo OpenAI Dactyl Rubik.
Trabalhar com uma mão robótica de quatro dedos e polegares nunca é trivial quando o desafio é demonstrar a destreza humana. A mão da OpenAI está ganhando olhares apreciativos com suas hábeis manipulações de dedos que uma mão humana precisaria para resolver o cubo.
Aqueles que estão familiarizados com o outro vídeo da OpenAI postado no ano passado já sabem sobre seus avanços, com o vídeo apelidado de Learning Dexterity. O vídeo era sobre o treinamento de uma mão robótica semelhante a um humano para manipular objetos físicos. Mesmo assim, eles sentiram que podiam se gabar de que a mão do robô poderia fazer isso com "destreza sem precedentes".
Foi assim que eles introduziram seu sistema, Dáctilo. Eles disseram que o Dactyl aprende do zero usando um código e algoritmo de aprendizado por reforço de propósito geral. "Nossos resultados mostram que é possível treinar agentes em simulação e fazer com que resolvam tarefas do mundo real, sem uma modelagem fisicamente precisa do mundo. "
Um engenheiro de aprendizado de máquina disse aos espectadores de vídeo que a técnica foi apelidada de randomização de domínio.
Eles randomizaram o quão rápido a mão pode se mover, por exemplo, e quão pesado é o bloco, e o atrito entre o bloco e a mão.
Dois comentários do vídeo de um ano atrás pensaram que isso não era realmente IA:"'IA' são apenas algoritmos abstratos neste momento. Não estamos nem perto de entender o que é inteligência, muito menos como sintetizá-lo. "
O outro comentário:"Isso nada mais é do que uma programação inteligente ... nenhuma inteligência. Esta é simplesmente uma máquina fazendo o que foi programada para fazer de forma circular. Apenas programe a coisa para girar os blocos da maneira correta desde o início e economize algum tempo e esforço ... Um computador só fará o que foi programado para fazer. "
Ainda, Karen Hao em MIT Technology Review pensei que a mão robótica da equipe era um passo importante em direção a robôs mais ágeis para aplicações industriais e de consumo.
Avance rapidamente para o novo artigo, "Resolvendo o cubo de Rubik com uma mão robótica."
Os autores explicaram que "Demonstramos que modelos treinados apenas em simulação podem ser usados para resolver um problema de manipulação de complexidade sem precedentes em um robô real. Isso é possível por meio de dois componentes principais:um novo algoritmo, que chamamos de randomização automática de domínio (ADR) e uma plataforma de robô construída para aprendizado de máquina. "
Eles falaram sobre a combinação de flip e rotação da face superior.
"Uma rotação corresponde a girar uma única face do cubo de Rubik em 90 graus no sentido horário ou anti-horário. Uma inversão corresponde a mover uma face diferente do cubo de Rubik para o topo. Descobrimos que girar a face superior está longe mais simples do que girar outras faces. Assim, em vez de faces arbitrárias rotativas, combinamos um flip e uma rotação de face superior para realizar a operação desejada. Essas metas secundárias podem ser executadas sequencialmente para, eventualmente, resolver o cubo de Rubik. "
Eles trataram de quaisquer suspeitas de que deram a si próprios uma vantagem injusta com um cubo idealmente embaralhado.
"A dificuldade de resolver um cubo de Rubik obviamente depende de quanto ele foi embaralhado antes. Usamos o método oficial de embaralhamento usado pela Associação Mundial de Cubos para obter o que eles chamam de embaralhamento justo (cerca de 20 movimentos que são aplicados a um resolveu o cubo de Rubik para embaralhá-lo).
O que outros roboticistas pensam sobre a mão da equipe OpenAI em um teste com o quebra-cabeças do Rubik?
Hao citou Dmitry Berenson, um roboticista da Universidade de Michigan.
"Este é um problema muito difícil, "disse ele." O tipo de manipulação necessária para girar as partes do cubo de Rubik é na verdade muito mais difícil do que girar um cubo. "
Mas o que a equipe quer dizer quando se refere a modelos treinados em simulação? Karen Hao em MIT Technology Review disseram que construíram um modelo virtual de seu robô. Eles o treinam virtualmente para fazer a tarefa em mãos. "O algoritmo aprende na segurança do espaço digital e pode ser transportado para um robô físico posteriormente." Agora, a chave para seu sucesso:Ho disse que "o laboratório embaralhou as condições simuladas em cada rodada de treinamento para tornar o algoritmo mais adaptável a diferentes possibilidades."
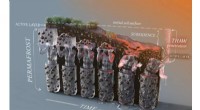
Eles usaram a (1) Mão Shadow Dexterous Série E como mão de robô, (2) o sistema de captura de movimento PhaseSpace para rastrear as coordenadas cartesianas das pontas dos dedos e (3) três câmeras RGB Basler foram usadas para estimativa de pose de visão.
Qual é o próximo?
Em um blog, membros da equipe afirmaram que "Resolver o Cubo de Rubik com uma mão de robô ainda não é fácil. Nosso método atualmente resolve o Cubo de Rubik 20% do tempo ao aplicar um embaralhamento de dificuldade máxima que requer 26 rotações de face. Para embaralhamentos mais simples que requerem 15 rotações para desfazer, a taxa de sucesso é de 60%.
Apesar disso, OpenAI não significa fugir da dificuldade. "Acreditamos que a destreza de nível humano está no caminho para a construção de robôs de uso geral e estamos animados para avançar nessa direção."
© 2019 Science X Network