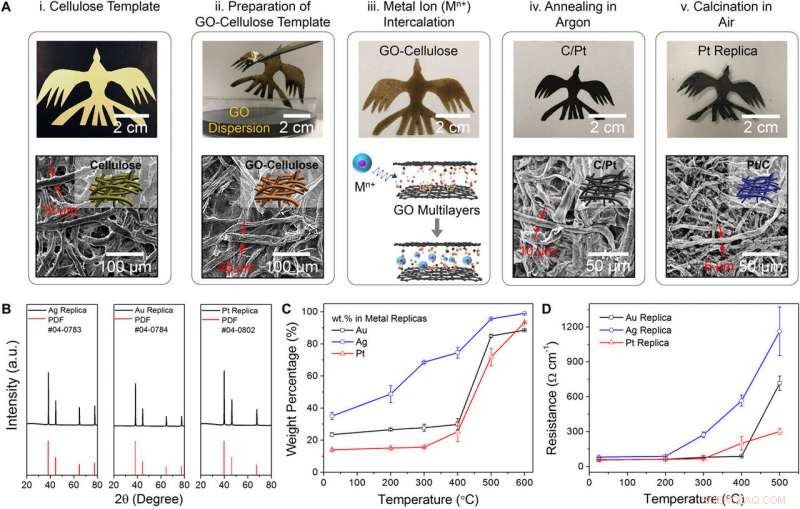
Síntese de modelagem habilitada para GO de réplicas de metal nobre. (A) A síntese de modelagem habilitada para GO para transformar o papel de celulose em réplicas de metal nobre. A síntese de uma réplica de Pt em forma de fênix é demonstrada. As imagens de SEM mostraram que as morfologias da rede do papel de celulose e do modelo GO-celulose eram muito semelhantes. O diâmetro das microfibras diminuiu de ~ 20 para ~ 6 μm após recozimento / calcinação de dois estágios. (B) Espectros de XRD (difração de raios-X) de réplicas de metal sintetizadas após recozimento / calcinação de dois estágios. Os espectros eram consistentes com seus correspondentes "arquivos de difração de pó (PDF)" do "comitê conjunto de padrões de difração de pó". (C) Porcentagens em peso de conteúdo metálico nas réplicas modeladas após a calcinação no ar em diferentes temperaturas. As percentagens em peso são determinadas por análise EDS (espectroscopia de energia dispersiva de raios-X). (D) Resistência de réplicas de metal modeladas (em 1 cm) após a calcinação no ar em diferentes temperaturas. As barras de erro indicam as diferenças nas medições de quatro amostras. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
Os robôs de origami podem ser formados pela integração total de várias funções de atuação, detecção e comunicação. Mas a tarefa é desafiadora, pois os materiais convencionais, incluindo plásticos e papel usados para tais designs robóticos, impõem restrições para limitar as funcionalidades adicionais. Para instalar multifuncionalidades no sistema, os cientistas geralmente devem incluir componentes eletrônicos externos que aumentam o peso do robô. Em um estudo recente agora publicado em Ciência Robótica , Haitao Yang e colegas dos departamentos interdisciplinares de Engenharia Química e Biomolecular, A Engenharia Biomédica e a Engenharia Elétrica e de Computação nos EUA e em Cingapura desenvolveram um processo de síntese de modelos habilitado para óxido de grafeno (GO) para produzir reconfiguráveis, backbones metálicos compatíveis e multifuncionais. Os backbones formaram a base para robôs de origami, juntamente com sensores de deformação integrados e recursos de comunicação sem fio. Usando o método GO, os pesquisadores formaram origamis de metais nobres complexos como réplicas estruturais de modelos de papel.
A equipe de pesquisa pode reproduzir estruturas de origami de platina estabilizadas com elastômeros finos para formar backbones multifuncionais para criar os novos robôs de origami. Os novos robôs eram mais deformáveis, retardador de fogo e eficiente em termos de energia do que aqueles construídos com outros materiais. Yang et al. observaram recursos adicionais para os novos robôs de platina (robôs Pt), incluindo aquecimento resistivo sob demanda, detecção de tensão e antenas integradas sem componentes eletrônicos externos. Para recursos adicionais, eles incluíram o monitoramento ou registro de movimentos robóticos em tempo real, comunicação sem fio entre robôs, regulação de calor e controle magnético. O novo trabalho enriqueceu a biblioteca de materiais de robótica para a engenharia de robôs soft versáteis.
Pesquisadores em robótica já haviam explorado a antiga arte japonesa do origami para criar músculos artificiais, máquinas auto-dobráveis, sistemas de origami de primavera e metamorfose robótica. Convencionalmente, eles usaram papel de celulose, poliéster, poliéter éter cetona e politetrafluoroetileno para fabricar estruturas para tais invenções. Apesar do suporte mecânico oferecido, backbones de papel ou plástico careciam de funcionalidades de resposta a estímulos, detecção e comunicação sem fio. Em vez de instalar equipamentos externos para fornecer tais funcionalidades, as equipes de pesquisa agora têm como objetivo desenvolver backbones robóticos flexíveis multifuncionais para uma integração perfeita. Os esforços de pesquisa ainda não demonstraram esses robôs soft prototípicos com backbones de origami condutores com potencial de detecção e comunicação. Como resultado, os cientistas estão ansiosos para desenvolver um novo esquema de fabricação para produzir mecanicamente estáveis, backbones robóticos suaves e condutores.
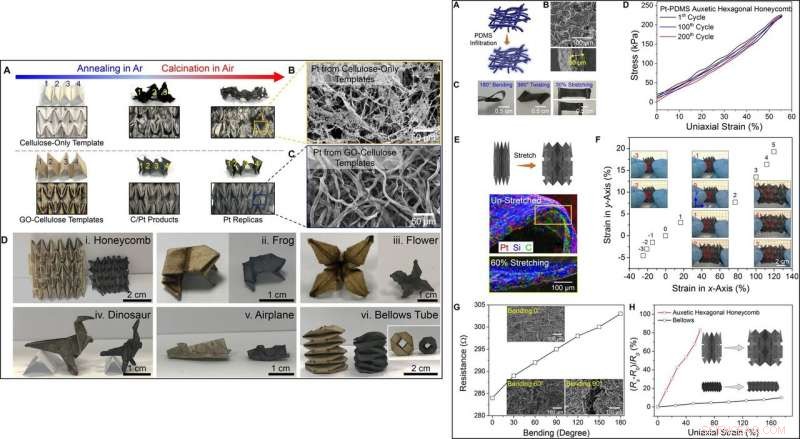
ESQUERDA:Fabricação de estruturas metálicas de origami. (A) Fotos dos produtos de origami de metal hexagonal auxético e quádruplo sintetizados apenas de celulose (linha superior) e modelos de celulose GO (linha inferior). Produtos à base de Pt em diferentes estágios de recozimento / calcinação são mostrados. Imagens de SEM de produtos Pt sintetizados a partir de modelos de celulose somente (B) e (C) GO-celulose. (D) Fotos de origami GO-celulose e réplicas de origami Pt com modelo reduzido, incluindo (i) favo de mel, (ii) sapo, (iii) flor, (iv) dinossauro, (v) avião, e (vi) tubo de fole. À DIREITA:Transformando réplicas de origami de Pt em metamateriais de elastômero de Pt deformáveis. (A) A infiltração de elastômero líquido diluído em réplicas de Pt modeladas permite a fabricação de metamateriais de elastômero de Pt. (B) Imagens SEM de cima para baixo e em corte transversal do compósito de elastômero de Pt. A espessura do compósito de elastômero Pt é de cerca de 90 μm. (C) Grande deformabilidade de uma película fina de elastômero Pt planar (curvatura de 180 °, Torção 360 °, e 30% de alongamento). (D) Curvas de tensão-deformação de um origami hexagonal auxético de elastômero de Pt durante o teste de estabilidade por 200 ciclos. (E) Imagens SEM in situ com mapeamento EDS de uma prega de elastômero Pt sob alongamento uniaxial de 90%. (F) Os padrões de origami hexagonal auxético de elastômero Pt são dependentes da tensão durante os processos de compressão uniaxial (marcados com -1 a -3) e alongamento (marcados com 1 a 5). A figura marcada com 0 representa o estado inicial. (G) Alterações de resistência de um filme plano de elastômero de Pt sob flexão de 0 ° a 180 °. (H) Mudanças de resistência relativa de origamis de elastômero de Pt hexagonal e de fole auxético sob várias cepas uniaxiais. Rs é a resistência do origami de elastômero Pt sob cepas uniaxiais; R0 é a resistência do origami de elastômero de Pt não tensionado. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
Durante o processo de fabricação, Yang et al. usou multicamadas de óxido de grafeno (GO) para intercalar uma variedade de precursores de íons metálicos, seguido por recozimento de alta temperatura e calcinação para produzir as estruturas GO de alta dimensão. As réplicas de óxido de metal incluíam microtexturas, fios independentes e estruturas complexas de origami com excelente controle químico e replicação estrutural. O método derivado de GO proposto fornecerá uma nova plataforma para produzir arquiteturas metálicas complexas como backbones multifuncionais para robôs soft.
Yang et al. converteu os filmes de papel de celulose ou formatos de origami em uma variedade de réplicas de metal usando o processo de modelagem habilitado para GO. Eles seguiram quatro etapas principais durante o processo de fabricação, começando com um modelo em forma de fênix para formar um sal de metal nobre (Mn + ) -complexos intercalados de GO-celulose (M-GO-celulose). As réplicas de metal resultantes foram submetidas a mais processos de recozimento e calcinação durante a fabricação e a equipe de pesquisa as controlou ajustando sua temperatura de calcinação. Os cientistas criaram estruturas metálicas de origami complexas, como favos de mel hexagonais, sapos, flores, dinossauros, aviões e foles convertendo várias estruturas de origami 3-D da forma de papel de celulose em metal de platina.
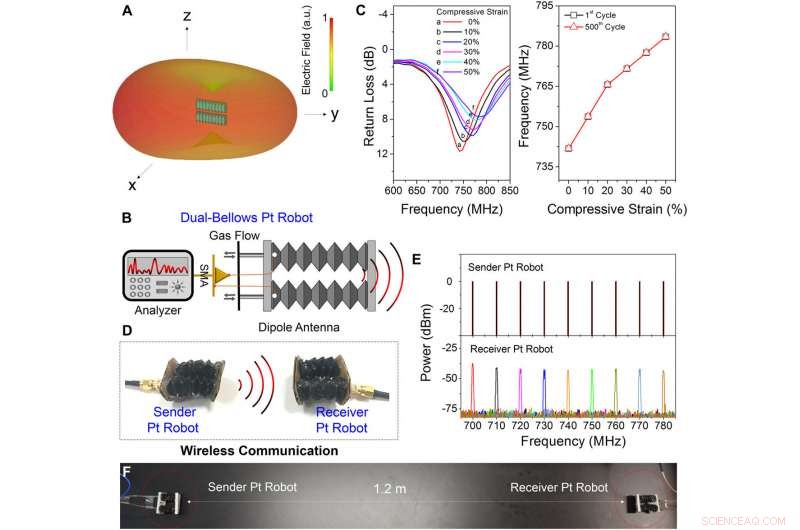
Robô Origami Pt com recursos de comunicação sem fio integrados. (A) Simulação de padrões de radiação 3D para dois tubos de fole de elastômero Pt a 741,8 MHz sob 0% de tensão. (B) Demonstração esquemática de um robô Pt de fole duplo, que também serviu como uma antena dipolo reconfigurável. (C) Esquerda:Perda de retorno da antena dipolo reconfigurável sob diferentes tensões de compressão de 0 a 50%. À direita:as frequências ressonantes são uma função das tensões compressivas antes e depois das atuações robóticas de 500 ciclos. (D) Fotografia de um robô Pt emissor (enviando sinais) (à esquerda) e um robô Pt receptor (recebendo sinais) (à direita). (E) Os sinais de pulso (o robô Pt emissor enviado) foram bem recebidos pelo robô Pt receptor. A frequência dos sinais enviados era idêntica aos sinais recebidos. (F) Dois robôs Pt foram capazes de se comunicar remotamente a uma distância de 1,2 m. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
Para melhorar a estabilidade mecânica, eles incluíram elastômeros finos nas estruturas de origami de metal para grande deformabilidade e reconfiguração reversível. Yang et al. escolheu o metal de platina devido à sua preservação estrutural eficiente, alta flexibilidade mecânica e alta condutividade elétrica em comparação com ouro (Au) ou prata (Ag). A equipe otimizou o backbone de elastômero Pt para alta condutividade elétrica e flexibilidade mecânica, para que o composto de elastômero Pt planar resultante sustente deformações grandes e repetidas - ideal para backbones robóticos suaves. Os backbones metálicos reconfiguráveis introduziram funcionalidades múltiplas e distintas para formar robôs de origami de metamaterial, incluindo potencial intrínseco para resistência ao fogo. A equipe de pesquisa testou esse recurso, permitindo que robôs Pt mantenham contato direto com uma chama para exposição prolongada (800 0 C por 30 segundos), em comparação, um robô de papel acendeu em segundos (menos de 5 segundos).
O backbone de elastômero Pt era mais fino e mais leve do que os robôs de papel de celulose, mas permaneceu mecanicamente estável durante o acionamento robótico reversível. O robô baseado em papel exigia grandes mudanças de pressão para alongar ou contrair; enquanto o robô Pt exigia apenas mudanças de pressão mais baixas. Yang et al. em seguida, desenvolveu o robô de origami Pt condutor para enviar e receber ondas eletromagnéticas (EM) e servir como uma antena reconfigurável para comunicação sem fio. Antes da fabricação, a equipe de pesquisa simulou padrões de radiação 3-D para explorar o uso de robôs Pt como antenas de radiação e os fabricou depois disso. Os cientistas também mostraram comunicação sem fio entre dois robôs Pt que serviam como remetente e receptor. Quando um robô remetente envia sinais de pulso em frequências diferentes, o robô receptor estacionado a 1,2 m de distância os recebeu sem desvio de frequência entre os sinais enviados e recebidos.
Comparação da pressão do gás entre robôs de papel e Pt. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
A equipe comparou cinco categorias de recursos robóticos no trabalho para demonstrar as vantagens técnicas do uso de backbones metálicos Pt habilitados para GO em relação a (1) densidade de backbone, (2) rigidez mecânica, (3) eficiência energética, (4) capacidades de detecção de deformação e (5) capacidades de comunicação sem fio. A equipe de pesquisa otimizou ainda mais os dois robôs Pt para comunicação sem fio, onde um robô remetente entregou instruções de navegação sem fio a um robô receptor para contornar com sucesso um obstáculo projetado, seguindo um caminho guiado.
A equipe então expandiu as aplicações do sistema usando manufatura 3-D aditiva, onde eles combinaram tinta Pt-Go-celulose com modelagem por deposição fundida (FDM) para imprimir formas metálicas moldadas de backbone robótico metálico em 3-D. Subseqüentemente, eles projetaram robôs Pt para controle remoto com campos magnéticos. Por esta, Yang et al. sintetizou uma réplica de Pt com tinta de celulose Pt-Go e infiltrou a solução de polímero com partículas magnéticas para criar um backbone de Pt magnético. As novas estruturas continham as habituais capacidades de detecção de deformação e comunicação sem fio integradas, com movimento magnético adicionado. Os robôs Pt magnéticos podem sofrer transformação reversível de forma e corpo sob atuação magnética para avançar em alinhamento com campos magnéticos rotativos.
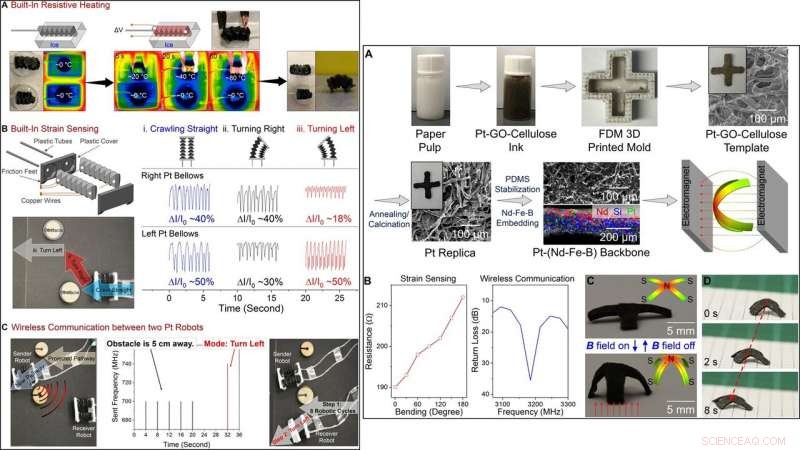
ESQUERDA:Demonstrações de robôs Pt multifuncionais. (A) Robô Pt de fole único com capacidade de aquecimento resistivo embutido. Dois robôs Pt foram congelados em cubos de gelo. Sob uma tensão aplicada de 20 V, o robô Pt superior foi rapidamente aquecido até ca. 80 ° C em 60 s, escapou do gelo, e continuou a engatinhar para a frente. (B) Robô Pt de fole duplo com capacidade de detecção de deformação integrada. Os backbones robóticos Pt foram conectados com fios de cobre, e a conexão foi fixada com pasta de prata. O caminho proposto para o robô Pt de fole duplo envolveu (i) rastejar em linha reta, (ii) virar à direita, e (iii) virar à esquerda. As atuações robóticas ao longo de todo o caminho foram monitoradas pela leitura dos perfis atuais dos tubos de fole Pt esquerdo e direito. (C) Comunicação sem fio entre dois robôs Pt de fole duplo. O robô remetente foi bloqueado por um obstáculo no caminho projetado e virou à esquerda para contornar o obstáculo. O robô emissor enviou uma série de sinais ao robô receptor. Os sinais foram então interpretados na orientação móvel para o robô receptor, permitindo que o robô tome o caminho proposto sem encontrar o obstáculo. À DIREITA:Fabricação de robô Pt com atuação magnética via tinta Pt-GO-celulose. (A) A fabricação alternativa de robôs Pt foi demonstrada pelo desenvolvimento da tinta Pt-GO-celulose e pela incorporação de impressão 3D FDM. Após recozimento / calcinação de dois estágios, Estabilização de PDMS, e incorporação com partículas de Nd-Fe-B, um robô tetrápode Pt– (Nd – Fe – B) magneticamente atuado foi fabricado. (B) Sensibilidade de deformação integrada e capacidades de comunicação sem fio do robô tetrápode Pt– (Nd – Fe – B). (C) Pt– (Nd – Fe – B) robô tetrápode arqueado para cima e para baixo sob atuações magnéticas. (D) Pt– (Nd – Fe – B) robô tetrápode avançou seguindo as trajetórias de campos magnéticos rotativos. Crédito:Science Advances, doi:10.1126 / scirobotics.aax7020.
Desta maneira, Haitao Yang e seus colegas desenvolveram um protocolo de síntese de modelos habilitado para Go para produzir reconfiguráveis, backbones metálicos compatíveis e multifuncionais para construir robôs de origami metálicos. Os robôs continham recursos integrados de detecção de deformação e comunicação sem fio. Os backbones metálicos sintéticos feitos com metais nobres complexos, incluindo prata, ouro e platina eram grandes réplicas estruturais de suas contrapartes em papel. Em comparação com papéis e plásticos tradicionais, os backbones de elastômero Pt reconfiguráveis ofereciam peso leve, deformabilidade e eficiência energética. Yang et al. imaginar aplicações práticas para robôs de origami metálico que variam de atividades em ambientes de alto risco, para uso em músculos artificiais e braços robóticos, e como robôs desamarrados controlados remotamente. Eles visam otimizar backbones metálicos com materiais eletroquimicamente ativos para formar dispositivos de armazenamento de energia em seguida. Esses desenvolvimentos irão enriquecer a biblioteca de materiais robóticos para fabricar diversos robôs soft com integração de alta funcionalidade.
© 2019 Science X Network