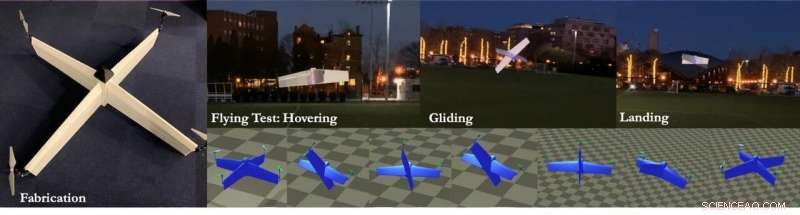
Veículos aéreos híbridos não tripulados, ou UAVs, são drones que combinam as vantagens de multi-helicópteros e aviões de asa fixa. Esses drones são equipados para decolar e pousar verticalmente como multi-helicópteros, ainda tem o forte desempenho aerodinâmico e recursos de economia de energia dos aviões tradicionais. Conforme os UAVs híbridos continuam a evoluir, Contudo, controlá-los remotamente ainda é um desafio. Crédito:Jie Xu
Veículos aéreos híbridos não tripulados, ou UAVs, são drones que combinam as vantagens de multi-helicópteros e aviões de asa fixa. Esses drones são equipados para decolar e pousar verticalmente como multi-helicópteros, ainda tem o forte desempenho aerodinâmico e recursos de economia de energia dos aviões tradicionais. Conforme os UAVs híbridos continuam a evoluir, Contudo, controlá-los remotamente ainda é um desafio.
Uma equipe do Laboratório de Ciência da Computação e Inteligência Artificial do Instituto de Tecnologia de Massachusetts (CSAIL) desenvolveu uma nova abordagem para projetar automaticamente um modo livre, agnóstico de modelo, Controlador controlado por AI para qualquer UAV híbrido. A equipe apresentará seu novo projeto de controlador computacional na SIGGRAPH 2019, realizada de 28 de julho a 1º de agosto em Los Angeles. Este encontro anual mostra os principais profissionais do mundo, acadêmicos, e mentes criativas na vanguarda da computação gráfica e técnicas interativas.
Para controlar UAVs híbridos, um sistema direciona os rotores do modelo de helicóptero do veículo para pairar e outro diferente direciona os rotores do modelo de avião para velocidade e distância. De fato, controlar UAVs híbridos é um desafio devido à complexidade da dinâmica de vôo do veículo. Tipicamente, os controladores foram projetados manualmente e são um processo demorado.
Nesse trabalho, a equipe abordou como projetar automaticamente um único controlador para os diferentes modos de voo (modo helicóptero, modo de deslizamento, transição, etc.) e como generalizar o método de design do controlador para qualquer modelo de UAV, forma, ou estrutura.
"Projetar um controlador para um projeto híbrido requer um alto nível de especialização e exige muito trabalho, "diz Jie Xu do MIT e co-autor da pesquisa." Com nosso método de projeto de controlador automático, qualquer não especialista poderia inserir seu novo modelo de UAV no sistema, espere algumas horas para calcular o controlador, e ter seus próprios UAVs customizados voando no ar. Esta plataforma pode tornar os UAVs híbridos muito mais acessíveis a todos. "
O método dos pesquisadores consiste em um projeto de controlador baseado em rede neural treinado por técnicas de aprendizado por reforço. Em seu novo sistema, os usuários primeiro projetam a geometria de um UAV híbrido selecionando e combinando peças de um conjunto de dados fornecido. O projeto é então usado em um simulador realista para calcular e testar automaticamente o desempenho de vôo do UAV. O algoritmo de aprendizado de reforço é então aplicado para aprender automaticamente um controlador para o UAV para obter o melhor desempenho na simulação de alta fidelidade. A equipe validou com sucesso seu método tanto em simulação quanto em testes de vôo reais.
Com a prevalência contínua de UAVs híbridos - na indústria de voo e nos setores militares, por exemplo, há uma necessidade crescente de simplificar e automatizar o projeto do controlador. Nesse trabalho, os pesquisadores tiveram como objetivo entregar um novo método independente de modelo para automatizar o projeto de controladores para veículos com configurações muito diferentes.
Em trabalho futuro, a equipe pretende investigar como aumentar a capacidade de manobra por meio de design de geometria aprimorada (forma, posições dos rotores / asas) de modo que possa ajudar a aperfeiçoar o desempenho de vôo do UAV.