Crédito:Sun et al.
Para navegar em ambientes dinâmicos, Os veículos autônomos (AVs) devem ser capazes de processar todas as informações disponíveis e usá-las para gerar estratégias de direção eficazes. Pesquisadores da Universidade da Califórnia, Berkeley, propuseram recentemente um esquema de percepção social para o planejamento do comportamento de carros autônomos, o que poderia ajudar a desenvolver AVs mais bem equipados para lidar com a incerteza em seu ambiente circundante.
"Minha pesquisa se concentrou em como projetar comportamentos de direção semelhantes aos humanos para carros autônomos, "Liting Sun, um dos pesquisadores que realizou o estudo, disse TechXplore. "Nosso objetivo é construir AVs que não compreendam apenas o comportamento humano, mas também atuam de maneira semelhante em vários aspectos, incluindo percepção, raciocínio e ação. "
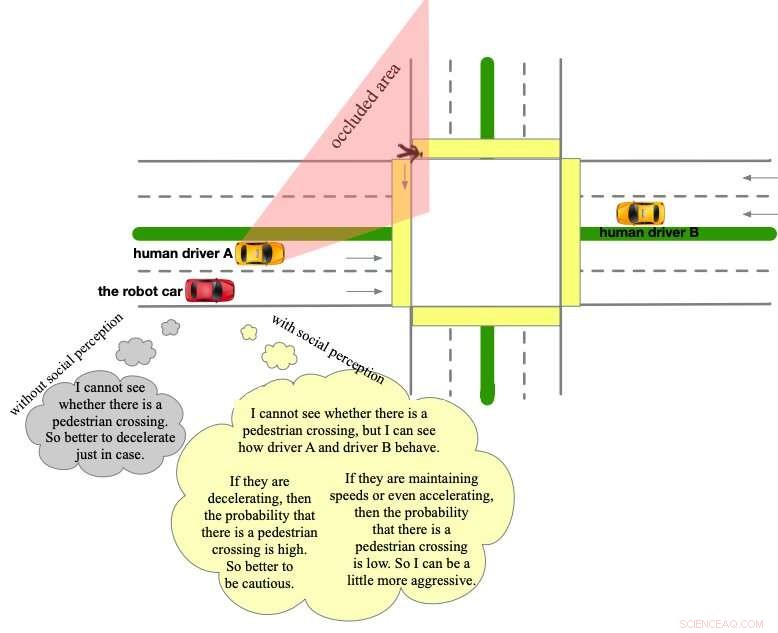
Sun e seus colegas observaram que os motoristas humanos tendem a tratar outros veículos como obstáculos dinâmicos, frequentemente inferindo informações adicionais de seu comportamento na estrada. Essas informações geralmente são informações do ambiente ocultadas ou informações sociais fisicamente indetectáveis.
"Seria muito importante e benéfico para os AVs se comportarem da mesma maneira, pois isso os tornaria mais inteligentes, mais parecido com o humano e, em última análise, mais seguro, "Disse Sun." Neste trabalho, permitimos que os AVs tratassem todos os outros participantes da estrada como sensores dinâmicos e distribuídos. "
O esquema de percepção social proposto por Sun e seus colegas trata essencialmente todos os veículos e obstáculos na estrada como sensores distribuídos em uma rede de sensores. Isso permite que os AVs observem os comportamentos individuais e grupos, usando suas observações para atualizar uniformemente diferentes tipos de incertezas dentro de um "espaço de crença". O esquema concentra-se particularmente nas incertezas do estado físico (por exemplo, causadas por oclusões ou alcance limitado do sensor) e incertezas de comportamento social (por exemplo, preferências de direção locais).
O esquema, então, integra crenças de percepção social atualizadas com uma estrutura de planejamento probabilística com base no modelo de controle preditivo (MPC), cuja função de custo é aprendida por meio da aprendizagem por reforço inverso (IRL). Essa combinação entre um módulo de planejamento probabilístico e percepção socialmente aprimorada permite que os veículos gerem comportamentos defensivos que são socialmente compatíveis e, portanto, não excessivamente rígidos.
"Observando os comportamentos dos outros e comparando-os com modelos de comportamento anteriores, Os AVs podem raciocinar sobre os possíveis estados das variáveis indetectáveis usando apenas seus próprios sensores, "Disse Sun." Isso pode ajudar os AVs a reduzir as incertezas da percepção, assim como os humanos fazem. Em comparação com outras abordagens existentes, a ideia neste trabalho estende efetivamente a capacidade de percepção dos AVs sem qualquer hardware adicional, e pode ajudar a gerar manobras mais seguras e eficientes. "
Sun e seus colegas avaliaram sua estrutura em uma série de simulações apresentando cenários representativos com oclusões de sensor. Eles descobriram que, ao imitar os mecanismos de percepção social dos humanos, o módulo de percepção detectou menos incertezas, em última análise, gerando comportamentos AV mais seguros e eficientes por meio de um planejador de defesa não conservador.
"Praticamente, este bom recurso pode tornar os AVs mais eficientes na presença de oclusões, bem como mais adaptável em novos ambientes de direção, porque eles podem inferir e aprender rapidamente sobre as informações sociais fisicamente indetectáveis em seus arredores, "Sun explicou.
No futuro, o esquema de percepção social elaborado por esta equipe de pesquisadores pode informar o desenvolvimento de carros autônomos que podem navegar continuamente em ambientes em mudança de forma mais eficaz. Sun e seus colegas estão agora planejando desenvolver ainda mais sua estrutura, mudando algumas de suas suposições e tornando-as mais fáceis de aplicar em situações da vida real.
"Para inferir informações adicionais incertas dos comportamentos de outros participantes da estrada, AVs devem ser equipados com modelos de comportamento anteriores que podem se aproximar dos comportamentos reais de outros, "Sun explicou." No trabalho atual, assumimos que todos os outros participantes da estrada são otimizadores racionais e aproximam seus modelos de geração de comportamento por meio de funções de recompensa. Em nosso trabalho futuro, vamos relaxar a suposição de racionalidade para tornar a aproximação mais prática. "
© 2019 Science X Network