Crédito:Chen et al.
Nanogeneradores, ferramentas tecnológicas que podem converter energia mecânica ou térmica em eletricidade, vêm em três projetos principais:piezoelétrico, triboelétrico e piroelétrico. Enquanto os nanogeradores piezoelétricos e triboelétricos podem converter energia mecânica em eletricidade, os piroelétricos funcionam através da captação de energia térmica.
Ao longo dos últimos anos, Os nanogeradores tribolétricos têm se tornado cada vez mais populares para aplicações de captação e detecção de energia. Até aqui, Contudo, seu desempenho na percepção de informações multidimensionais e tarefas de controle interativo tem sido bastante decepcionante.
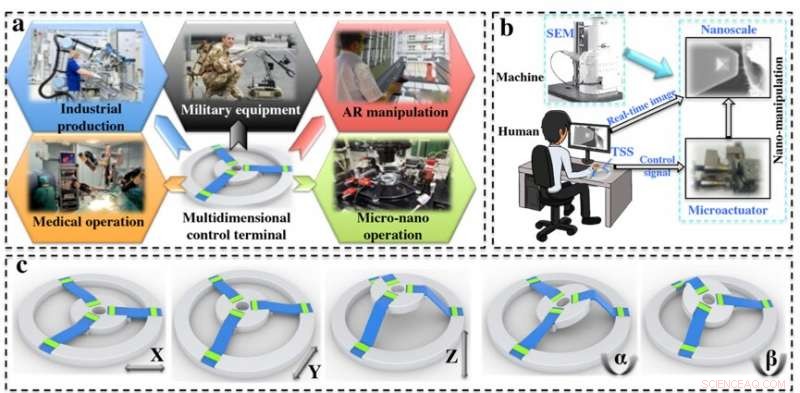
Pesquisadores da Universidade Nacional de Cingapura desenvolveram recentemente sensores para controlar objetos no espaço 3D com base em nanogeradores triboelétricos. Esses sensores, apresentado em um artigo publicado em Nano Energia , são constituídos por uma estrutura paralela com três faixas sensoriais simétricas fixadas em sua base e um estágio móvel conectado a elas.
"Com o desenvolvimento da ciência, tecnologias de automação e robótica penetraram em muitos aspectos das atividades humanas, "Tao Chen, um dos pesquisadores que realizou o estudo, disse TechXplore. "Os robôs não são apenas amplamente usados em linhas de produção automáticas e campos de entretenimento, mas também pode ter médicos, aplicação aeroespacial e militar, assim como muitos outros. Contudo, são inacessíveis, desafios imprevisíveis, perigosos ou inevitáveis para os humanos interagirem ou realizarem tarefas complexas em ambientes onde o equipamento é mantido em vácuo, submarino, escala espacial e nanométrica, etc. "
Para permitir interações eficazes entre humanos e sistemas automatizados, pesquisadores desenvolveram terminais de controle que podem ser operados de várias maneiras, como telas sensíveis ao toque, teclados ou estruturas de rocker. Na maioria dos casos, esses mecanismos de controle são indiretos, portanto, eles precisam de análises e cálculos de instrução complexos para corresponder ao estado de movimento do objeto a ser manipulado.
"Nesse artigo, apresentamos um sensor de faixa triboelétrica ultra-extensível (TSS) para controlar as atitudes do objeto no espaço, "Chen explicou." Nosso TSS pode melhorar o desempenho de robôs em uma variedade de ambientes, incluindo submarino, espaço e muito mais. "
Em seu estudo, Chen e seus colegas usaram uma faixa tribolelétrica ultra-extensível como um sensor espacial, o que permite que os robôs controlem objetos no espaço 3D. Devido ao efeito de acoplamento de triboeletrificação e indução eletrostática, o comprimento da tira muda, com o mesmo ponto de contato do dedo gerando diferentes relações de saída de sinal de dois eletrodos terminais (E1 e E2). Esses eletrodos funcionam como a interface interativa para detecção e controle multidimensionais.
"Uma extremidade do eletrodo E1 da tira é fixada, enquanto o eletrodo E2 é móvel sob tensão de tração em relação a E1, "Chen disse." A relação da tensão de saída dos dois eletrodos (VE2 / VE1) é obtida durante o contato e separação do dedo e da borracha de silicone com distância constante de E1. Além disso, a tira é esticada por um certo comprimento, o decréscimo da relação de voltagem é determinado quando tocamos novamente a mesma posição (ponto de referência) a uma distância constante em relação ao eletrodo E1. "
À medida que o comprimento de alongamento da tira aumenta, esta relação de tensão diminui. O mecanismo usado por Chen e seus colegas permitiu que medissem o comprimento estendido do lado E2 da tira, tocando o ponto de referência que é fixado em E1. Em outras palavras, o deslocamento de sua tira enquanto ela é esticada, sua velocidade de alongamento e a aceleração do eletrodo E2 podem ser medidas com uma frequência de contato constante.
"O princípio de detecção de sensor usado aqui é principalmente para determinar o comprimento, comparando a razão de tensão entre os dois eletrodos, "Disse Chen." Conseqüentemente, o mecanismo de detecção usando o método de razão de tensão evita a influência da umidade ambiental e da força desigual. Então, este é um método de detecção eficaz para evitar instabilidade e interferência. "
Chen e seus colegas introduziram um novo método de detecção de objetos baseado em um sensor de movimento longitudinal que usa relações de voltagem geradas. Em seu estudo, eles usaram três sensores flexíveis autoalimentados para alcançar uma projeção de posicionamento 5D no espaço. Seu método é mais simples e mais intuitivo do que as estruturas rígidas (não esticáveis) tradicionais subjacentes, no entanto, também adiciona dimensões de espaço.
"Atualmente, a operação da nanoescala usando o modo de alça ou chave não é intuitiva, "Chen disse." Nossa abordagem pode ser mais flexível e intuitiva para interações homem-máquina em escala nano. "
Em uma demonstração preliminar, os pesquisadores usaram seu dispositivo TSS como um terminal humano-nanomáquina para controlar seu nanomanipulador em uma tarefa de microscopia eletrônica de varredura (SEM). Nesta tarefa, seu dispositivo permitiu que operassem os nanotubos de carbono e concluíssem com sucesso a extração dos nanotubos de carbono.
"Os resultados da micromanipulação que coletamos confirmam o excelente desempenho do dispositivo TSS em aplicações de percepção e controle, que são relevantes para campos como robótica, VR e IoT, "Disse Chen." Em um estudo de acompanhamento, pretendemos realizar pesquisas sobre o controlador bimanual, para alcançar uma interação homem-máquina mais intuitiva e conveniente. "
© 2019 Science X Network