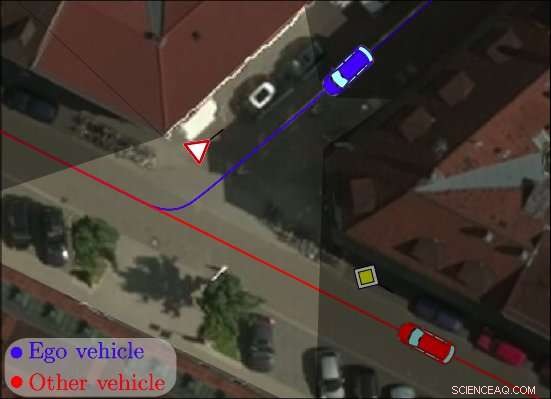
Um cenário de interseção exemplar destacando um caso de uso da abordagem proposta. O veículo do ego, retratado em azul ao longo deste artigo, prossegue até uma interseção na qual deve ceder. O veículo tem visibilidade limitada e um veículo de interseção está se aproximando da região obstruída. O planejador do veículo deve considerar que pode haver um veículo se aproximando e reduzir adequadamente sua velocidade. Crédito:Tas &Stiller.
Pesquisadores do Centro de Pesquisa de Tecnologia da Informação da FZI desenvolveram um novo método que pode melhorar o planejamento de movimento de veículos autônomos em ambientes incertos ou em condições de visibilidade limitada. Seu papel, pré-publicado no arXiv, descreve uma técnica para evitar colisões na evolução do pior caso de um determinado cenário.
"A direção automatizada em ambientes urbanos e sob condições adversas é um desafio e permanece no topo da pesquisa, "Os pesquisadores escreveram em seu artigo." Condições adversas de clima e luz resultam em má qualidade na percepção, introduzindo maiores incertezas e campos receptivos limitados. "
Os desafios descritos pelos pesquisadores são talvez de relevância ainda maior em ambientes urbanos, onde eventos inesperados tornam mais difícil prever o resultado de uma situação. Para lidar com essas dificuldades, estudos anteriores tentaram desenvolver sistemas de percepção de ponta para veículos automatizados.
Apesar disso, mesmo o mais avançado desses sistemas, equipado com sensores e tecnologia de última geração, muitas vezes lutam para lidar com a incerteza, assim, apenas reduzindo o risco de colisões. Para resolver este problema, os pesquisadores da FZI se concentraram no planejamento de movimento em um ambiente incerto com oclusões.
“Neste artigo, analisamos as incertezas às quais um veículo automatizado está sujeito, "Os pesquisadores explicaram." Nós estudamos diferentes situações de tráfego desafiadoras para um veículo com um campo receptivo limitado. "
Depois de estudar as condições em que um planejador de movimento precisa considerar veículos se aproximando de regiões que não são visíveis, os pesquisadores desenvolveram uma abordagem para detectar rapidamente comportamentos não conformes. A abordagem deles imita um pouco a maneira como os motoristas humanos normalmente abordam cruzamentos, dirigir com mais cautela e em velocidade reduzida.
"Apresentamos um método para permanecer livre de colisões para a evolução do pior caso de uma determinada cena, "Os pesquisadores escreveram." Nós definimos critérios que medem as margens disponíveis para uma colisão enquanto consideramos a visibilidade e as interações e, conseqüentemente, integramos as condições que aplicam esses critérios em um planejador de movimento baseado em otimização. "
Os pesquisadores avaliaram seu método em um ambiente de simulação de loop fechado e descobriram que ele generalizou bem vários cenários urbanos diferentes. Sua abordagem agora foi integrada a um veículo automatizado, chamado BERTHAONE.
"Nosso trabalho futuro lidará com cenários mais complexos, onde uma infinidade de rotas e opções de manobra, como mudanças de faixa, estão disponíveis, "escreveram os pesquisadores.
© 2018 Science X Network