Crédito:Harvard University
Más notícias para os ofiófobos:pesquisadores da Escola de Engenharia e Ciências Aplicadas (SEAS) de Harvard John A. Paulson desenvolveram um novo e aprimorado robô macio inspirado em cobras que é mais rápido e preciso do que seu antecessor.
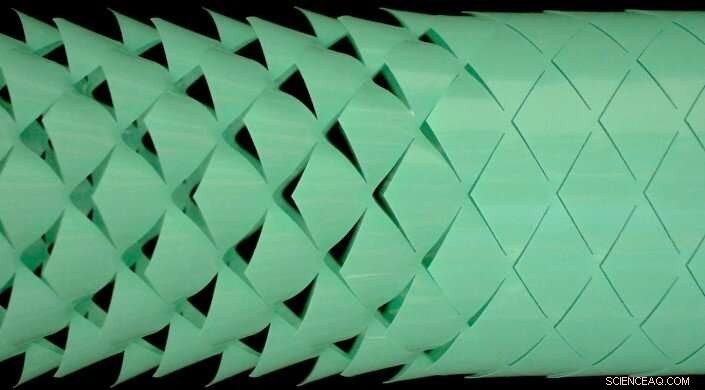
O robô é feito com kirigami - uma embarcação de papel japonesa que depende de cortes para alterar as propriedades de um material. Conforme o robô se alonga, a superfície kirigami "surge" em uma superfície texturizada 3-D, que agarra o solo como pele de cobra.
O robô de primeira geração usou uma folha plana de kirigami, que se transformou uniformemente quando esticado. O novo robô tem um shell programável, o que significa que os cortes de kirigami podem aparecer conforme desejado, melhorando a velocidade e precisão do robô.
A pesquisa foi publicada no Proceedings of the National Academy of Sciences .
"Este é um primeiro exemplo de uma estrutura kirigami com deformações pop-up não uniformes, "disse Ahmad Rafsanjani, um pós-doutorado na SEAS e primeiro autor do artigo. "Em kirigami plano, o pop-up é contínuo, o que significa que tudo aparece de uma vez. Mas na concha do kirigami, pop up é descontínuo. Este tipo de controle da transformação de forma pode ser usado para projetar superfícies responsivas e peles inteligentes com mudanças sob demanda em sua textura e morfologia. "
A nova pesquisa combinou duas propriedades do material - o tamanho dos cortes e a curvatura da folha. Ao controlar esses recursos, os pesquisadores foram capazes de programar a propagação dinâmica de pop-ups de uma extremidade a outra, ou controlar pop-ups localizados.
Em pesquisas anteriores, uma folha plana de kirigami foi enrolada em torno de um atuador de elastômero. Nesta pesquisa, a superfície do kirigami é enrolada em um cilindro, com um atuador aplicando força nas duas extremidades. Se os cortes forem de um tamanho consistente, a deformação se propaga de uma extremidade do cilindro para a outra. Contudo, se o tamanho dos cortes for escolhido com cuidado, a pele pode ser programada para deformar nas sequências desejadas.
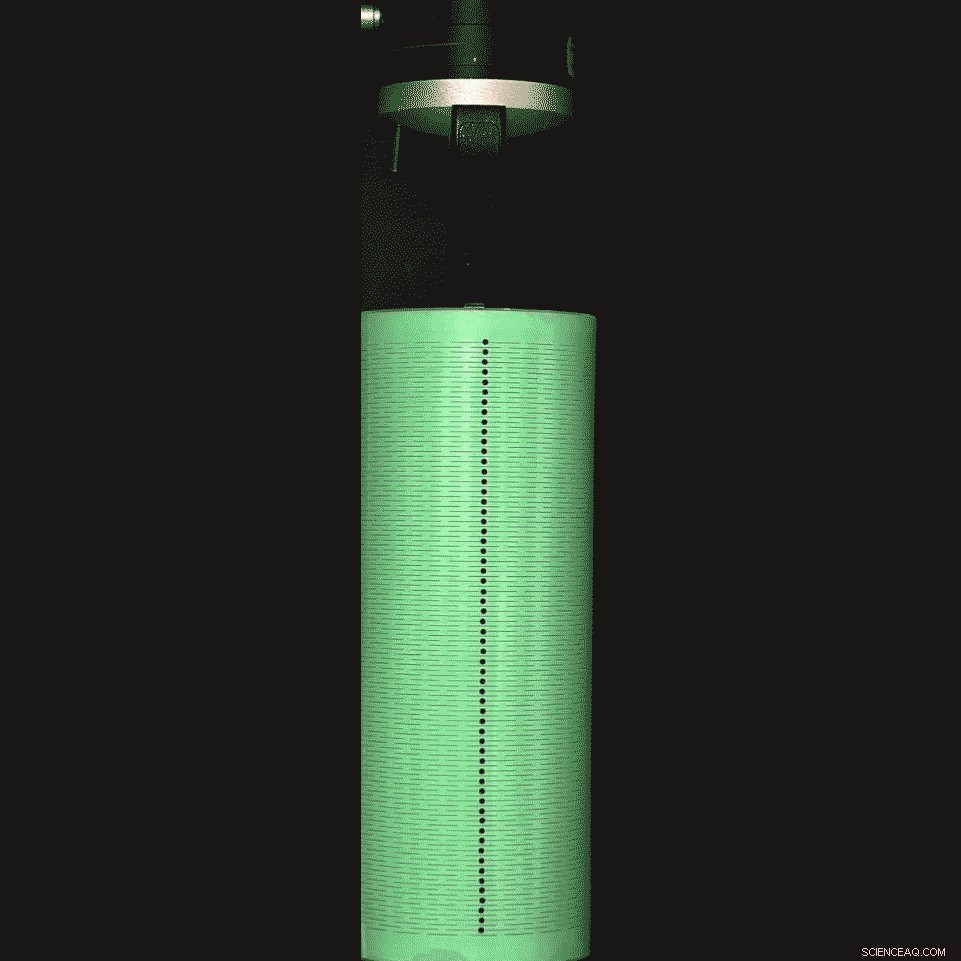
Este é um robô macio inspirado em cobras novo e aprimorado que é mais rápido e mais inteligente que seu antecessor. Crédito:Harvard SEAS
"Pegando ideias de materiais de transformação de fase e aplicando-as a materiais arquitetados inspirados em kirigami, demonstramos que as fases pop e não pop podem coexistir ao mesmo tempo no cilindro, "disse Katia Bertoldi, William e Ami Kuan Danoff Professor de Mecânica Aplicada no SEAS e autor sênior do artigo. "Simplesmente combinando cortes e curvaturas, podemos programar comportamentos notavelmente diferentes. "
Próximo, os pesquisadores pretendem desenvolver um modelo de design inverso para deformações mais complexas.
"A ideia é, se você sabe como gostaria que a pele se transformasse, você pode apenas cortar, rolar e ir, "disse Lishuai Jin, aluna de pós-graduação da SEAS e coautora do artigo.