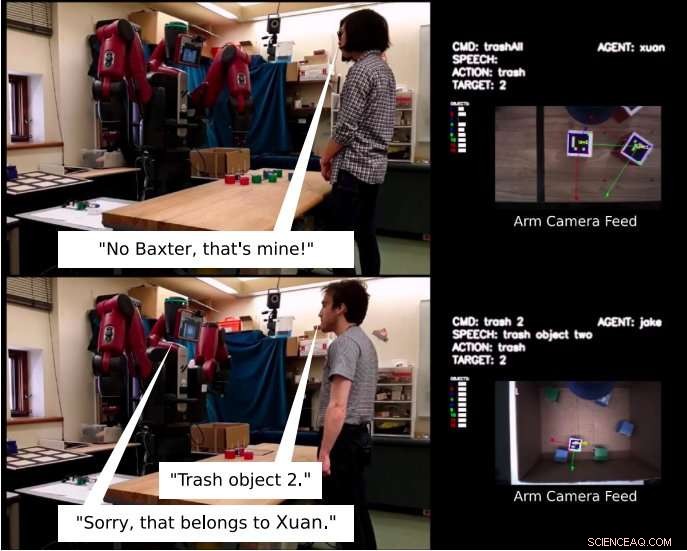
 p Aprendizagem de propriedade via interação humano-robô. Acima:O robô é interrompido verbalmente no meio da ação por Xuan ao descartar o objeto 2. Abaixo:Tendo aprendido as relações de propriedade e as permissões de ação interagindo com Xuan, o robô nega o pedido de Jake para descartar o objeto 2. Crédito:Tan, Brawer &Scassellati.
p Aprendizagem de propriedade via interação humano-robô. Acima:O robô é interrompido verbalmente no meio da ação por Xuan ao descartar o objeto 2. Abaixo:Tendo aprendido as relações de propriedade e as permissões de ação interagindo com Xuan, o robô nega o pedido de Jake para descartar o objeto 2. Crédito:Tan, Brawer &Scassellati.
p Uma equipe de pesquisadores da Universidade de Yale desenvolveu recentemente um sistema robótico capaz de representar, aprender e inferir relações de propriedade e normas. Seu estudo, pré-publicado no arXiv, aborda alguns dos desafios complexos associados ao ensino de normas sociais para robôs e como se conformar com elas. p À medida que os robôs se tornam mais predominantes, é importante que eles sejam capazes de se comunicar com os humanos de maneira eficaz e adequada. Um aspecto fundamental das interações humanas é compreender e se comportar de acordo com as normas sociais e morais, pois isso promove uma coexistência positiva com outras pessoas.
p Normas de propriedade são um conjunto de normas sociais que ajudam a navegar em ambientes compartilhados de maneiras que são mais atenciosas com os outros. Ensinar essas normas aos robôs pode melhorar suas interações com os humanos, permitindo-lhes distinguir entre ferramentas sem propriedade e ferramentas com propriedade que são compartilhadas temporariamente com eles.
p "Meu laboratório de pesquisa se concentra na construção de robôs que sejam fáceis de interagir com as pessoas, "Brian Scassellati, um dos pesquisadores que realizou o estudo, disse TechXplore. "Parte desse trabalho é ver como podemos ensinar as máquinas sobre conceitos sociais comuns, coisas que são essenciais para nós, como humanos, mas que nem sempre são os tópicos que mais chamam a atenção. Compreensão sobre propriedade de objetos, permissões, e alfândega é um desses tópicos que não tem recebido muita atenção, mas será fundamental para a forma como as máquinas operam em nossas casas, escolas, e escritórios. "
p Na abordagem desenvolvida por Scassellati, Xuan Tan e Jake Brawer, a propriedade é representada como um gráfico de relações probabilísticas entre os objetos e seus proprietários. Isso é combinado com um banco de dados de normas baseadas em predicados, que restringem as ações que o robô tem permissão para realizar usando os objetos de sua propriedade.
p "Um dos desafios neste trabalho é que algumas das maneiras que aprendemos sobre propriedade são através de regras explícitas (por exemplo, 'não pegue minhas ferramentas') e outros são aprendidos com a experiência, "Scassellati disse." Combinar esses dois tipos de aprendizagem pode ser fácil para as pessoas, mas é muito mais desafiador para robôs. "
p O sistema desenvolvido pelos pesquisadores combina um novo algoritmo de aprendizado de normas incremental que é capaz de aprendizado único e indução a partir de exemplos, com inferência bayesiana de relações de propriedade em resposta a aparentes violações de regras e previsão baseada em percepção dos prováveis proprietários de um objeto. Juntos, esses componentes permitem que o sistema aprenda as normas e relações de propriedade aplicáveis em uma variedade de situações.
p "A chave do trabalho que Xuan e Jake fizeram foi combinar dois tipos diferentes de representação de aprendizado de máquina, aquele que aprende com esses explícitos, regras simbólicas e que aprendem com pequenos pedaços de experiência, "Scassellati explicou." Fazer esses dois sistemas funcionarem juntos é o que torna isso desafiador, e no final, o que tornou isso bem-sucedido. "
p Os pesquisadores avaliaram o desempenho de seu sistema robótico em uma série de experimentos simulados e reais. Eles descobriram que ele poderia concluir com eficácia as tarefas de manipulação de objetos que exigiam uma variedade de normas de propriedade a serem seguidas, com notável competência e flexibilidade.
p O estudo realizado por Scassellati e seus colegas oferece um exemplo notável de como os robôs podem ser treinados para inferir e respeitar as normas sociais. Pesquisas futuras podem aplicar construções semelhantes a outras capacidades relacionadas a normas e abordar situações complexas nas quais normas ou objetivos diferentes estão em conflito uns com os outros.
p "Continuamos a estudar como construir robôs que interajam mais naturalmente com as pessoas, e este estudo se concentra apenas em um aspecto deste trabalho, "Scassellati disse. p © 2018 Science X Network