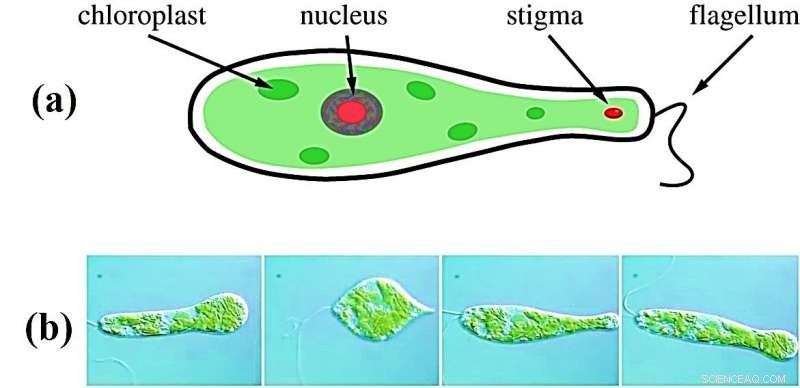
a) Ilustração esquemática de um organismo euglenóide mostrando vários organismos celulares, incluindo um flagelo. Imagem adaptada de:IEE Robot. Autom. Lett., doi:10.1109 / LRA.2017.2726113, b) Sequência de imagens do movimento de Eutreptiella spirogyra durante o movimento euglenóide. Imagens reproduzidas com permissão de, Richard E. Triemer, o Projeto Euglenóide. Crédito:RSIF, doi:10.1098 / rsif.2018.0301
A natação é uma forma de locomoção empregada por muitos organismos em uma ampla gama de escalas na natureza. Microorganismos com pequena massa que encontram o domínio de forças viscosas no meio requerem uma mudança na forma que não varia com o tempo para atingir a propulsão fluídica alinhada com a hidrodinâmica. Para superar este desafio, flagelados unicelulares da família Euglena desenvolveram um movimento característico conhecido como 'movimento euglenóide', no qual o corpo muda significativamente de forma, permitindo que o organismo navegue por fluidos viscosos e espaços minúsculos. Essa capacidade de mudar a forma do corpo e se mover através de espaços restritos e ambientes desordenados é particularmente atraente em robôs biomiméticos de engenharia. As aplicações de exemplo de robôs em miniatura incluem o movimento através de fluidos biológicos durante procedimentos médicos in vivo e a navegação por entulhos em ambientes externos durante as operações de busca e resgate de sobreviventes.
Inspirado por euglenoides, Krishna Manaswi Digumarti e colegas de trabalho do Departamento de Engenharia e Matemática apresentaram o design e o desenvolvimento do EuMoBot, um robô soft multi-segmentado. O robô biomimético pode replicar grandes deformações de corpo para locomoção. No estudo, os cientistas projetaram dois robôs em tamanhos diferentes para operar com um volume interno constante. O protocolo de engenharia fez uso da hiperelasticidade de câmaras elastoméricas preenchidas com fluido para replicar o movimento dos euglenóides. Dos dois, o robô menor se movia a uma velocidade de 1/5 do comprimento do corpo por ciclo, enquanto o robô maior se movia a uma velocidade de 1/10 do comprimento do corpo por ciclo. O estudo mostrou como robôs biomiméticos suaves podem ser empregados para mudar a forma e replicar o movimento biológico, enquanto atua como uma ferramenta para estudar robôs biomiméticos.
Os cientistas também apresentaram um método quantitativo baseado em descritores elípticos de Fourier para caracterizar e comparar a forma do robô com sua contraparte biológica euglenóide. Os resultados mostraram 85 por cento de semelhança na forma, indicando que a técnica de engenharia era aplicável para desenvolver robôs em miniatura. O método permitiu aos cientistas entender a evolução da forma em não linear, robôs soft dinâmicos que não tinham uma forma específica para serem modelados. Os resultados do estudo estão agora publicados no Interface do Jornal da Royal Society .
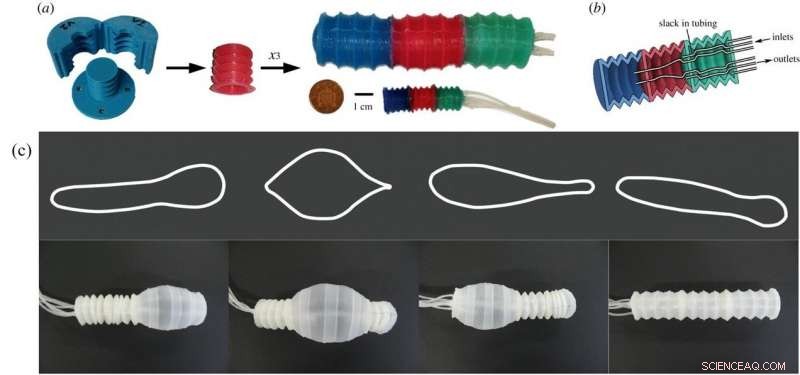
Fabricação do robô macio multissegmentado unindo três atuadores HEB. a) Molde impresso tridimensional com duas metades e um núcleo usado para fundir o elastômero de silicone. Meio:uma única câmara do atuador. À direita:um robô de três segmentos fabricado em duas escalas diferentes. Um centavo inglês mostrado para escala. b) Vista transversal do robô mostrando diferentes câmaras. Cada câmara foi fornecida com um tubo de entrada e saída. Folga suficiente fornecida para permitir a livre expansão das câmaras. c) Topo:contorno das formas das células durante o movimento do euglenóide. Embaixo:o robô macio fabricado replicando a forma do euglenóide bioinspirada. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
Estratégias de engenharia biomimética inspiraram pesquisadores a buscar projetos do reino animal e criar robôs de inspiração biológica. Euglenoides são flagelados unicelulares, extensivamente estudado no laboratório como modelos devido ao seu caráter semelhante a planta e animal. Os organismos usam estratégias únicas para nadar em números baixos de Reynolds e os estudos sobre sua locomoção são relativamente recentes. As células do organismo são normalmente equipadas com um ou mais flagelos para nadar, ao mesmo tempo que exibe um segundo tipo de movimento mais lento denominado movimento euglenóide, em que a célula sofre uma mudança dramática de forma. No presente estudo, Digumarti et al. usou a segunda forma de movimento para projetar um soft, robô funcional baseado no comportamento do microrganismo.
A razão evolutiva para a mudança observada na forma durante o movimento euglenóide é desconhecida, embora se acredite que a deformação no tamanho da célula surgiu em resposta a estímulos fortes, como a luz, aquecer, choque químico ou contato. Quando os microrganismos foram colocados em um labirinto microscópico cheio de fluido semelhante ao seu ambiente natural, muitos mostraram movimento euglenóide, sugerindo que o movimento era adequado para ambientes restritos. Movimento dessa natureza pode ser útil para um robô bioinspirado no campo da robótica suave para atravessar ambientes desordenados usando deformações de corpo grande.
No estudo, os autores apresentaram o design, princípio de atuação e método de fabricação para projetar EuMoBot, um robô macio que demonstra o movimento do euglenóide. A locomoção através de um fluido foi quantificada em relação ao movimento natural do microorganismo. Uma vez que os mecanismos subjacentes de mudança de forma foram previamente estudados em detalhes, Digumarti et al. focado na forma macroscópica do euglenóide na forma robótica, sem replicar as mudanças no nível microscópico. Para gerar atuadores fluídicos macios, os pesquisadores desenvolveram um novo dispositivo semelhante a um fole chamado de atuador de "fole hiperelástico" (HEB), conforme detalhado anteriormente pelo mesmo grupo de pesquisa.

a) Demonstrar a conformidade do robô conforme ele se expande entre os parafusos rígidos. b) Sequência de imagens no início e no final de um ciclo de locomoção em mesa plana. c) Robô escalando dentro de um tubo usando uma marcha do tipo minhoca de polegada. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
Os engenheiros formaram a forma do atuador usando um molde impresso 3-D. Eles fabricaram dois robôs de tamanhos diferentes. Eles lançam três câmaras de atuador, seguido por elastômero misturado com pigmentos injetados no molde para curar durante a noite e formar um invólucro branco translúcido. O robô macio com bioinspiração continha uma câmara de inflar / desinflar para replicar a forma do euglenóide e obter similaridade em movimento.
Para testar a locomoção dos robôs projetados, os pesquisadores os colocaram em um tanque cheio de uma solução de metilcelulose em água. Os robôs em cada experimento tinham um volume interno constante, e seu fluido interno mudou de uma câmara para a próxima, reproduzir o movimento de uma característica de onda de expansão para euglenoides. Ambos os robôs mostraram capacidade de nadar mudando a forma de seus corpos. A disparidade de velocidade dependia do volume de fluido bombeado pelas câmaras do robô macio. Os cientistas observaram a semelhança hidrodinâmica entre o robô macio e o microorganismo em relação aos números de Reynold em ambos os tamanhos. O robô macio não se limitou apenas a trabalhar em um ambiente fluido como sua contraparte biológica, com capacidade de movimentação multimodal sobre mesa plana e escalada em tubo com volume de operação não constante.
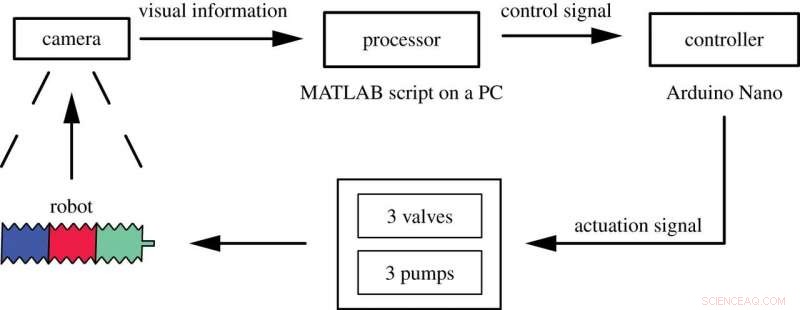
Vista esquemática da arquitetura de controle do robô soft. Uma câmera é usada para determinar o estado atual do robô. Um script MATLAB processa essas informações para determinar o estado atual do robô, que inclui a expansão e contração de cada câmara. Em seguida, ele passa pelos sinais de controle apropriados para um Arduino, que controla a operação de bombas e válvulas para direcionar o fluxo de fluido dentro do robô. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
O robô emprega uma abordagem baseada em feedback para controle autônomo, removendo a necessidade de modelar a dinâmica da bomba e fluxo de fluido dentro do robô. Uma estimativa de visão mecânica do tamanho da câmara por meio de uma câmera e o script MATLAB forneceu feedback. O sistema usou a expansão e contração de cada câmara para controlar o fluxo de fluido dentro do robô. Sensores dentro do robô permitiam medições diretas da pressão do fluido.
A estimativa da forma do robô foi realizada com descritores matemáticos extraídos de gravações de vídeo anteriores do organismo. Os cientistas usaram o descritor elíptico de Fourier para contornos fechados para descrever a forma de um robô hiperelástico macio e o compararam com um organismo biológico pela primeira vez no estudo. O descritor elíptico de Fourier foi extraído em quatro etapas principais para estimar a forma do objeto. A quantidade de variação na forma capturada por um autovetor foi usada para medir quantitativamente a similaridade na forma entre o robô e o organismo. A forma dos euglenóides foi caracterizada distintamente pelos três primeiros componentes principais, enquanto a variação nos robôs foi espalhada por mais componentes, sugerindo que as formas extremas dos euglenóides não foram totalmente reproduzidas nos robôs.
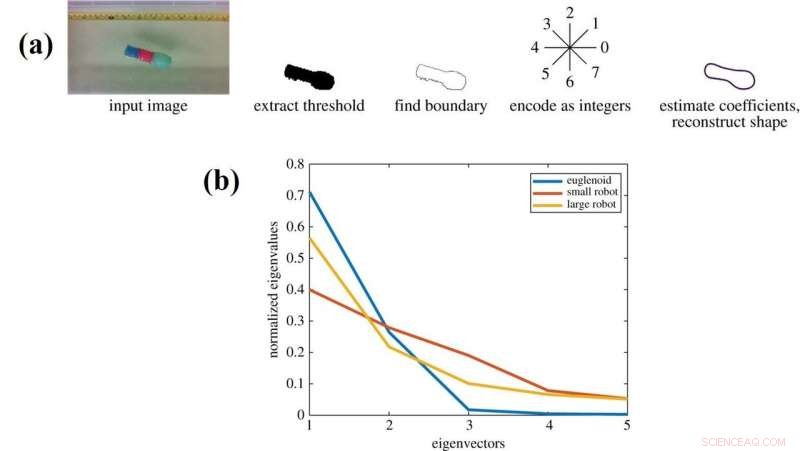
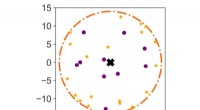
a) Os quatro estágios da estimativa da forma. Primeiro, a região de interesse é extraída da imagem. Próximo, a fronteira é identificada. Esse contorno é então codificado como um conjunto de inteiros de Freeman. Finalmente, um conjunto de coeficientes de Fourier é calculado, e forma reconstruída. b) Autovalores normalizados dos primeiros cinco autovetores que descrevem a forma dos robôs macios em comparação com o euglenóide. Crédito:RSIF, doi:10.1098 / rsif.2018.0301.
Com base nos valores próprios, os robôs maiores reproduziram formas mais próximas do euglenóide em comparação com os robôs menores. A razão para a diferença observada pode ser devido ao design das dobras do fole (fole hiperelástico - HEBs). Parâmetros dos ângulos de dobra, seu número e densidade podem ser otimizados para obter uma melhor replicação de formato. Comparado aos microorganismos naturais, o robô não produziu uma mudança suave ao fazer a transição do fluido de uma câmara para outra, potencialmente, uma vez que a parede limite sintética, apesar de sua elasticidade, pode restringir localmente a expansão da câmara. Isso também pode explicar a incapacidade do robô de assumir formas extremas.
Como um todo, o robô macio multissegmentado EuMoBot pode replicar o movimento do euglenóide, além de nadar com mudança de forma e locomoção em ambientes não fluidos, permitindo que o robô suave e complacente opere em espaços restritos. Trabalho adicional é necessário para entender a relação entre os componentes principais e a capacidade de locomoção. As extremidades das formas exibidas pelos EuMoBots eram limitadas devido à resistência à tração do material associado e seu design de dispositivo monolítico. Técnicas de fabricação alternativas, como impressão 3-D e litografia suave, podem abordar os limites da elasticidade do material. Os robôs também podem ser projetados para se parecerem com euglenoides com precisão matemática, replicando a estrutura microscópica da película inerente ao organismo para uma transição mais suave durante a locomoção. A capacidade de dirigir pode ser incluída no projeto do robô com bobinas atuadas de liga com memória de forma ou usando restrições no material com fontes internalizadas de energia para resiliência, dispositivos miniaturizados em trabalhos futuros.
© 2018 Science X Network