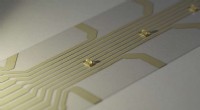
Os pesquisadores de Stanford desenvolveram o sensor parecido com a pele na ponta do dedo desta mão robótica, e programou-o para tocar na fruta sem danos. Um dia eles esperam criar sistemas de controle para permitir que um robô perceba as características dos objetos e calcule autonomamente quanta força aplicar. Crédito:the Bao Lab
Os engenheiros de Stanford desenvolveram uma luva eletrônica contendo sensores que poderiam um dia dar às mãos robóticas o tipo de destreza que os humanos consideram natural.
Em um artigo publicado em 21 de novembro em Ciência Robótica , A engenheira química Zhenan Bao e sua equipe demonstraram que os sensores funcionam bem o suficiente para permitir que uma mão robótica toque uma fruta delicada e manuseie uma bola de pingue-pongue sem esmagá-la.
"Essa tecnologia nos coloca no caminho de um dia dar aos robôs o tipo de capacidade de detecção encontrada na pele humana, "Bao disse.
Bao disse que os sensores nas pontas dos dedos da luva medem simultaneamente a intensidade e a direção da pressão, duas qualidades essenciais para alcançar a destreza manual. Os pesquisadores ainda precisam aperfeiçoar a tecnologia para controlar automaticamente esses sensores, mas quando o fazem, um robô com a luva pode ter a destreza de segurar um ovo entre o polegar e o indicador sem quebrá-lo ou deixá-lo escorregar.
Eletrônica imitando a vida
A luva eletrônica imita a maneira como as camadas da pele humana trabalham juntas para dar às nossas mãos sua extraordinária sensibilidade.
Nossa camada externa de pele está imbuída de sensores para detectar pressão, calor e outros estímulos. Nossos dedos e palmas são particularmente ricos em sensores de toque. Esses sensores funcionam em conjunto com uma subcamada de pele chamada espinhoso, um terreno microscópico acidentado de colinas e vales.
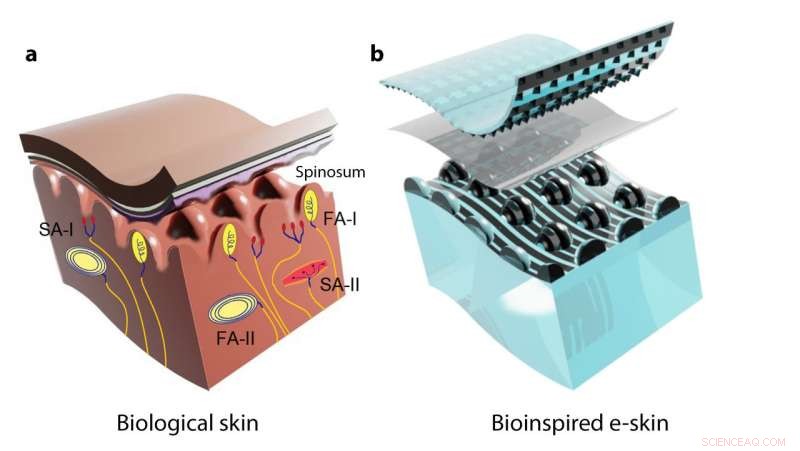
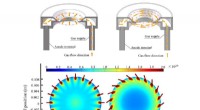
Uma seção transversal da pele humana da ponta do dedo representando as principais estruturas sensoriais (à esquerda). Essa estrutura serviu de inspiração para o design do e-skin (direita). Crédito:Boutry et al., Sci. Robô . 3, eaau6914 (2018)
Essa irregularidade é crítica. Quando nosso dedo toca um objeto, a camada externa da pele se aproxima do espinhoso. Um leve toque é sentido principalmente por sensores próximos ao topo das colinas. Uma pressão mais intensa força a pele externa para dentro dos vales do espinhoso, desencadeando sensações de toque mais intensas.
Mas medir a intensidade da pressão é apenas parte do que o espinhoso permite. Esta subcamada irregular também ajuda a revelar a direção da pressão, ou força de cisalhamento. Um dedo pressionando o norte, por exemplo, cria sinais fortes nas encostas sul dessas colinas microscópicas. Essa capacidade de sentir a força de cisalhamento é parte do que nos ajuda a segurar um ovo entre o polegar e o indicador, de maneira suave, mas firme.
A pós-doutoranda Clementine Boutry e o aluno de mestrado Marc Negre lideraram o desenvolvimento de sensores eletrônicos que imitam esse mecanismo humano. Cada sensor na ponta do dedo da luva robótica é feito de três camadas flexíveis que funcionam em conjunto. As camadas superior e inferior são eletricamente ativas. Os pesquisadores colocaram uma grade de linhas elétricas em cada uma das duas superfícies opostas, como linhas em um campo, e tornou essas linhas perpendiculares umas às outras para criar uma matriz densa de pequenos pixels de detecção. Eles também tornaram a camada inferior acidentada como o espinhoso.
O isolador de borracha no meio simplesmente mantinha as camadas superior e inferior dos eletrodos separadas. Mas essa separação foi crítica, porque os eletrodos que estão próximos sem se tocar podem armazenar energia elétrica. Quando o dedo robótico pressionou, apertando os eletrodos superiores mais perto da parte inferior, a energia armazenada aumentou. As colinas e vales da camada inferior forneceram uma maneira de mapear a intensidade e a direção da pressão para pontos específicos nas grades perpendiculares, muito parecido com a pele humana.
Toque delicado
Para testar sua tecnologia, os pesquisadores colocaram seus sensores de três camadas nos dedos de uma luva de borracha, e coloque a luva em uma mão robótica. Eventualmente, o objetivo é embutir sensores diretamente em uma cobertura semelhante a uma pele para mãos robóticas. Em um experimento, eles programaram a mão robótica com luva para tocar suavemente uma baga sem danificá-la. Eles também programaram a mão enluvada para levantar e mover uma bola de pingue-pongue sem esmagá-la, usando o sensor para detectar a força de cisalhamento apropriada para agarrar a bola sem deixá-la cair.
Bao disse que, com a programação adequada, uma mão robótica usando a atual luva sensível ao toque poderia realizar uma tarefa repetitiva, como retirar os ovos de uma esteira transportadora e colocá-los em caixas de papelão. A tecnologia também pode ter aplicações em cirurgia assistida por robô, onde o controle de toque preciso é essencial. Mas o objetivo final de Bao é desenvolver uma versão avançada da luva que aplica automaticamente a quantidade certa de força para manusear um objeto com segurança, sem programação prévia.
"Podemos programar uma mão robótica para tocar uma framboesa sem esmagá-la, mas estamos muito longe de sermos capazes de tocar e detectar que é framboesa e permitir que o robô o pegue, " ela disse.