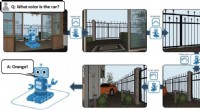
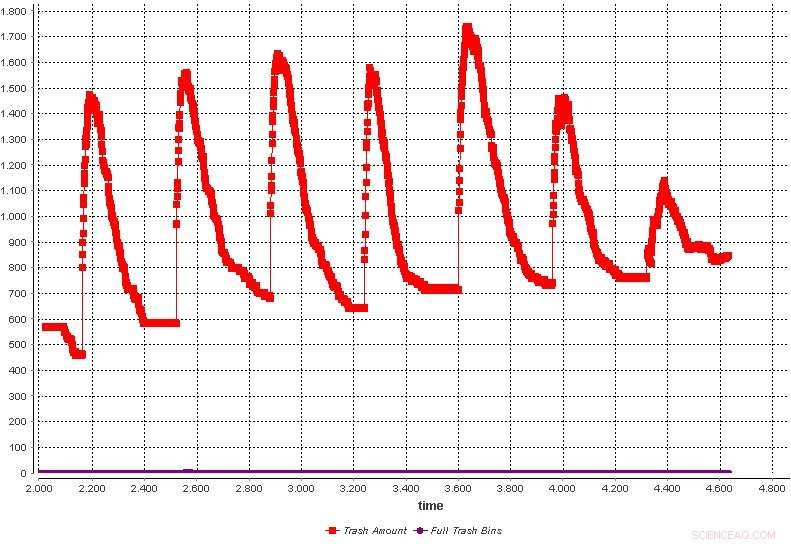
 p Imagem mostrando a rapidez com que o despejo de novo lixo no ambiente urbano é descartado. Crédito:Alfeo et al.
p Imagem mostrando a rapidez com que o despejo de novo lixo no ambiente urbano é descartado. Crédito:Alfeo et al.
p Pesquisadores do MIT Media Lab, a Universidade de Pisa, e a Université Libre de Bruxelles exploraram recentemente a viabilidade do uso de sistemas robóticos de enxame para o gerenciamento autônomo de resíduos. A abordagem deles, descrito em um artigo pré-publicado no arXiv, aplica métodos de forrageamento bioinspirados para a robótica de enxame, com o objetivo de melhorar a eficiência e autonomia da gestão de resíduos nas cidades. p “Com veículos autônomos, enxames de drones para entregas e equipes de robôs organizando armazéns, a cidade do futuro será um ecossistema cibernético composto de máquinas e humanos, “Antonio Luca Alfeo, um dos pesquisadores que realizaram o estudo disse ao Tech Xplore. "Este é um cenário fascinante, além de um enorme desafio tecnológico. O gerenciamento de tais sistemas resulta em uma complexidade que cresce exponencialmente à medida que mais máquinas são implantadas, especialmente se quisermos que eles realmente 'vivam conosco' e reajam de forma autônoma às mudanças nas necessidades do ambiente ao seu redor. "
p A natureza oferece vários exemplos de como problemas semelhantes de coexistência podem ser resolvidos de maneira brilhante e eficaz. Em seu estudo, os pesquisadores tentaram aplicar essas soluções inspiradas na natureza para o gerenciamento de enxames de robôs.
p “Propomos um sistema de eliminação de lixo com enxames de robôs cuja auto-organização é baseada no comportamento de insetos sociais, também conhecido como forrageamento baseado em stigmergy, "Alfeo explicou." O sistema proposto trata do descarte do lixo, de latas de lixo a alguns depósitos centrais. "
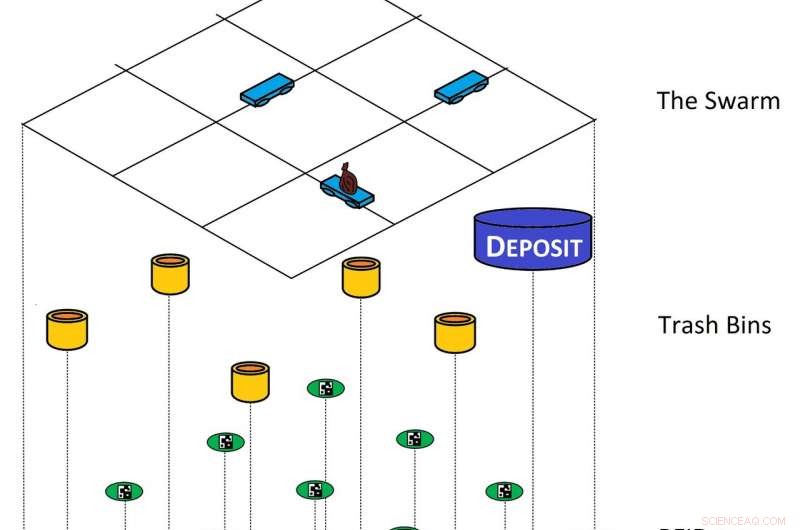 p "Feromônios virtuais" lançados por outros robôs em etiquetas RFID no ambiente urbano. Crédito:Alfeo et al.
p "Feromônios virtuais" lançados por outros robôs em etiquetas RFID no ambiente urbano. Crédito:Alfeo et al.
p Os robôs desenvolvidos por Alfeo e seus colegas não são controlados e orientados por um serviço remoto. Em vez de, todas as suas decisões são tomadas no calor do momento, com base em suas percepções e observações em tempo real.
p “Entre essas percepções, também existem 'feromônios virtuais' lançados por outros robôs em etiquetas RFID no ambiente urbano, "Disse Alfeo." Estas marcam o caminho mais conveniente de uma ou mais latas de lixo não vazias e o depósito mais próximo. Mais importante, graças ao seu comportamento coletivo, o enxame é capaz de se auto-organizar de forma autônoma para atingir as áreas com maior quantidade de lixo, sempre fornecendo uma resposta eficaz. "
p O design desta solução inovadora exigiu uma grande variedade de habilidades e cobriu diferentes áreas de especialização. A equipe que o desenvolveu é, portanto, altamente interdisciplinar, com formação em ciência urbana, robótica bioinspirada, e ciência de dados.
p “Membros da equipe especializada em ciência da cidade forneceram o modelo do robô utilizado no estudo e trataram da modelagem do espaço urbano no GAMA, uma plataforma de simulação multiagente, "Disse Alfeo." Aqueles que são hábeis no projeto comportamental de enxames de robôs perceberam e testaram a lógica do enxame em um modelo devidamente ampliado do ambiente urbano. Finalmente, a análise das implicações de cada escolha de design foi supervisionada por cientistas de dados altamente proficientes. "
p Alfeo e seus colegas avaliaram seu sistema de enxame para gerenciamento de resíduos e descobriram que superava as abordagens existentes. O estudo também ofereceu informações valiosas sobre a melhor forma de projetar e personalizar sistemas robóticos de enxame.
p "Mostramos que um enxame de robôs auto-organizados pode levar a grandes melhorias no contexto da gestão de resíduos, sem qualquer fonte externa de informação ou conhecimento prévio sobre a demanda de descarte de lixo, "Disse Alfeo." Além disso, fornecemos uma visão sobre o design de tal sistema com o objetivo de equilibrar suas duas propriedades principais, isso é, a capacidade exploratória e a capacidade de resposta do enxame. O primeiro pode reduzir a ocorrência de lixeiras cheias, enquanto o último ajuda a reduzir a quantidade de lixo no ambiente urbano. "
p A pesquisa realizada por Alfeo e seus colegas é um exemplo fascinante e útil de como os sistemas de robótica de enxame podem ser aplicados em ambientes urbanos. Seus resultados são altamente promissores, abrindo novas possibilidades interessantes que poderiam ser exploradas no futuro.
p "A abordagem proposta não é específica para a gestão de resíduos e pode ser testada em uma série de aplicações diferentes, como veículos autônomos, "Alfeo disse." Uma vez que, neste caso, a segurança é um fator crítico, Contudo, o projeto de tal sistema deve incluir outras soluções específicas, como a tecnologia de cadeia de blocos. " p © 2018 Science X Network