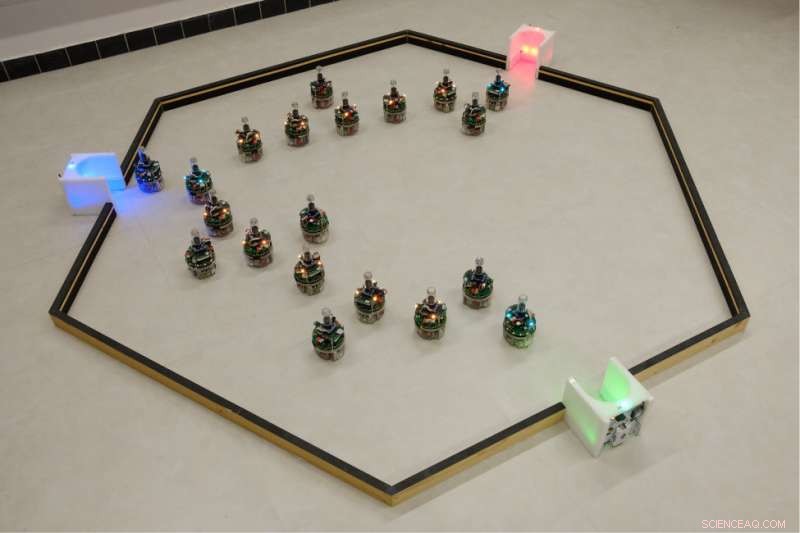
TS-Swarm em sua arena com três cabines. Crédito:Garattoni e Birattari, Sci. Robô. 3, eaat0430 (2018)
Os robôs poderão em breve ajudar as equipes de resgate a salvar os sobreviventes de um desastre natural? Tal missão exigiria que os robôs fossem capazes de determinar, por conta deles, quais tarefas executar e em que ordem executá-las; por exemplo, não adianta tentar tirar uma vítima dos escombros se os escombros ainda não foram removidos. Atualmente, os engenheiros são responsáveis por programar a seqüência de ações. Mas isso pode mudar em breve!
Mauro Birattari e Lorenzo Garattoni, pesquisadores do laboratório IRIDIA (Escola de Engenharia de Bruxelas, Université Libre de Bruxelles), mostraram recentemente que os robôs são capazes de decidir coletivamente em que ordem devem completar suas tarefas. Os resultados de suas pesquisas são publicados em Ciência Robótica esta quarta-feira, 18 de julho.
Os pesquisadores do laboratório IRIDIA basearam seu estudo na robótica de enxame, um ramo da robótica que se baseia no comportamento coletivo e organizado de animais sociais (como formigas) para criar grupos de robôs que exibem inteligência artificial. Os robôs atualmente são capazes de se comunicar e coordenar a fim de tomar decisões e realizar tarefas simples, como mover um objeto ou escolher um dos dois caminhos. Para suas pesquisas mais recentes, Mauro Birattari e Lorenzo Garattoni deram um passo adiante em termos de complexidade:eles criaram um enxame de robôs capaz de realizar uma sequência de três ações, sem saber a ordem correta com antecedência. Na prática, os robôs foram obrigados a se mover para três pontos diferentes no espaço, onde deveriam realizar uma tarefa simples. Somente após a conclusão das tarefas os robôs saberiam se a ordem estava correta. Para resolver este problema, alguns dos robôs gradualmente formam uma cadeia entre os três pontos no espaço, que os outros usam como guia para testar as várias combinações possíveis seguindo as instruções dos robôs que compõem a corrente (ver foto). Eventualmente, eles determinam a sequência correta trabalhando juntos.
Este estudo demonstra, pela primeira vez, que os robôs são capazes de determinar coletivamente uma sequência de ações cuja ordem exigida era previamente desconhecida. Essa capacidade de planejar com antecedência é considerada uma habilidade cognitiva complexa, e emerge das interações entre os indivíduos do grupo:juntos, os robôs são capazes de planejar uma sequência de ações, que nenhum indivíduo do grupo seria capaz de fazer sozinho.
Esta pesquisa abre o caminho para uma série de aplicações potenciais envolvendo um grupo de robôs 'inteligentes', ou seja, robôs que podem resolver problemas por conta própria. As possibilidades que os pesquisadores antecipam incluem a busca por sobreviventes após um desastre natural, explorando ambientes desconhecidos ou hostis, construir estruturas em locais perigosos, e várias aplicações na agricultura. A capacidade - demonstrada neste estudo - de determinar autonomamente a ordem em que as tarefas devem ser concluídas é essencial para esses tipos de missões.
Mauro Birattari é laureado com uma bolsa ERC Consolidator. Esta pesquisa foi conduzida para o projeto ERC "DEMIURGE:automatic design of robot swarms."