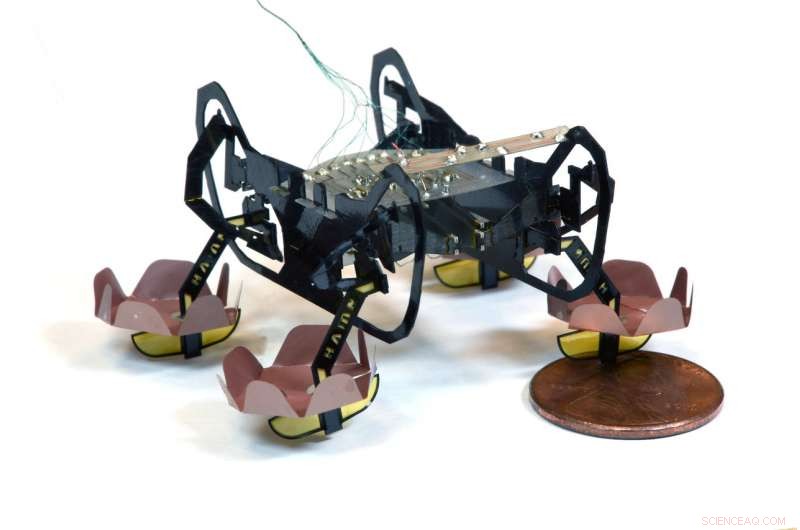
A próxima geração de Microrrobô Ambulatório de Harvard (HAMR) pode andar na terra, nadar na superfície da água, e andar debaixo d'água, abrindo novos ambientes para este pequeno bot explorar. Crédito:Yufeng Chen, Neel Doshi, e Benjamin Goldberg / Harvard University
Na natureza, as baratas podem sobreviver debaixo d'água por até 30 minutos. Agora, uma barata robótica pode fazer ainda melhor. Microrrobô Ambulatório de Harvard, conhecido como HAMR, pode andar na terra, nadar na superfície da água, e andar debaixo d'água o tempo que for necessário, abrindo novos ambientes para este pequeno bot explorar.
Este HAMR de próxima geração usa almofadas multifuncionais que dependem da tensão superficial e flutuabilidade induzida pela tensão superficial quando o HAMR precisa nadar, mas também pode aplicar uma tensão para romper a superfície da água quando o HAMR precisa afundar. Este processo é chamado de eletrowetting, que é a redução do ângulo de contato entre um material e a superfície da água sob uma tensão aplicada. Essa mudança do ângulo de contato torna mais fácil para os objetos romperem a superfície da água.
Mover-se na superfície da água permite que um microrrobô evite obstáculos submersos e reduz o arrasto. Usando quatro pares de abas assimétricas e andaduras de natação personalizadas, HAMR robo-paddles na superfície da água para nadar. Explorando a interação instável entre as abas passivas do robô e a água circundante, o robô gera movimentos de natação semelhantes aos de um besouro mergulhador. Isso permite que o robô nade com eficácia para a frente e vire.
"Esta pesquisa demonstra que os microrobóticos podem alavancar a física de pequena escala - neste caso, a tensão de superfície - para executar funções e capacidades que são desafiadoras para robôs maiores, "disse Kevin Chen, pós-doutorado na Escola de Engenharia e Ciências Aplicadas de Harvard John A. Paulson (SEAS) e primeiro autor do artigo.

As almofadas multifuncionais do HAMR dependem da tensão superficial e da flutuabilidade induzida pela tensão superficial quando o HAMR precisa nadar, mas também podem aplicar uma tensão para romper a superfície da água quando o HAMR precisa afundar. Crédito:Yufeng Chen, Neel Doshi, e Benjamin Goldberg / Harvard University
A pesquisa mais recente está publicada na revista. Nature Communications .
"O tamanho do HAMR é a chave para seu desempenho, "disse Neel Doshi, aluno de pós-graduação da SEAS e coautor do artigo. "Se fosse muito maior, seria um desafio suportar o robô com tensão superficial e se fosse muito menor, o robô pode não ser capaz de gerar força suficiente para quebrá-lo. "
O HAMR pesa 1,65 gramas (quase tanto quanto um clipe de papel grande), pode transportar 1,44 grama de carga útil adicional sem afundar e pode remar suas pernas com uma frequência de até 10 Hz. É revestido em Parylene para evitar que entre em curto sob a água.
Uma vez abaixo da superfície da água, O HAMR usa a mesma marcha para andar que em terra firme e é tão móvel. Para retornar à terra firme, o HAMR enfrenta um enorme desafio devido ao porão da água. Uma força de tensão superficial da água que é duas vezes o peso do robô empurra o robô para baixo, e, além disso, o torque induzido causa um aumento dramático de fricção nas patas traseiras do robô. Os pesquisadores endureceram a transmissão do robô e instalaram almofadas macias nas pernas dianteiras do robô para aumentar a capacidade de carga útil e redistribuir o atrito durante a escalada. Finalmente, subindo uma inclinação modesta, o robô consegue se soltar da água.
"Este robô ilustra bem alguns dos desafios e oportunidades com robôs de pequena escala, "disse o autor sênior Robert Wood, Charles River Professor de Engenharia e Ciências Aplicadas na SEAS e membro do corpo docente do Harvard Wyss Institute for Biologicamente Inspired Engineering. "O encolhimento traz oportunidades para maior mobilidade - como andar na superfície da água - mas também desafios, uma vez que as forças que consideramos certas em escalas maiores podem começar a dominar no tamanho de um inseto."
Próximo, os pesquisadores esperam melhorar ainda mais a locomoção do HAMR e encontrar uma maneira de retornar à terra sem uma rampa, talvez incorporando adesivos inspirados em lagartixas ou mecanismos de salto impulsivo.