 p Crédito:Queensland University of Technology
p Crédito:Queensland University of Technology
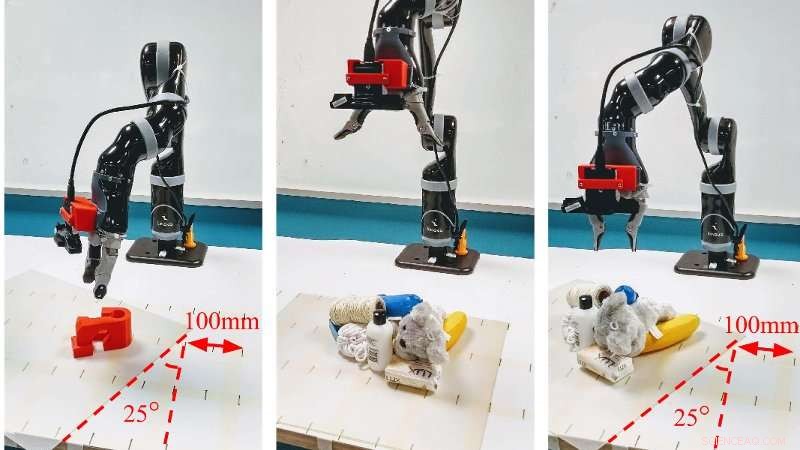
p Os roboticistas da QUT desenvolveram uma maneira mais rápida e precisa para os robôs agarrarem objetos, inclusive em ambientes desordenados e em constante mudança, que tem o potencial de melhorar sua utilidade em ambientes industriais e domésticos.
- A nova abordagem permite que um robô escaneie rapidamente o ambiente e mapeie cada pixel que captura para sua qualidade de compreensão usando uma imagem de profundidade
- Os testes do mundo real alcançaram altas taxas de precisão de até 88% para apreensão dinâmica e até 92% em experimentos estáticos.
- A abordagem é baseada em uma Rede Neural Convolucional de Agarramento Gerativo
p O Dr. Jürgen Leitner, da QUT, disse que agarrar e pegar um objeto era uma tarefa básica para os humanos, foi extremamente difícil para as máquinas.
p "Conseguimos programar robôs, em ambientes muito controlados, para pegar itens muito específicos. Contudo, uma das principais deficiências dos atuais sistemas de agarramento robótico é a incapacidade de se adaptar rapidamente às mudanças, como quando um objeto é movido, "Dr. Leitner disse.
p "O mundo não é previsível - as coisas mudam, se movem e se confundem e, muitas vezes, isso acontece sem aviso - então, os robôs precisam ser capazes de se adaptar e trabalhar em ambientes muito desestruturados se quisermos que sejam eficazes, " ele disse.
p O novo método, desenvolvido por Ph.D. pesquisador Douglas Morrison, Dr. Leitner e o Distinto Professor Peter Corke da Faculdade de Ciências e Engenharia da QUT, é em tempo real, método de síntese de agarramento independente de objeto para agarramento de loop fechado.
p "A abordagem da Rede Neural Convolucional de Agarramento Gerativo prevê a qualidade e a pose de uma pegada com dois dedos em cada pixel. Mapeando o que está à sua frente usando uma imagem de profundidade em uma única passagem, o robô não precisa provar muitos diferentes apertos possíveis antes de tomar uma decisão, evitando longos tempos de computação, "Sr. Morrison disse.
p "Em nossos testes do mundo real, alcançamos uma taxa de sucesso de agarramento de 83% em um conjunto de objetos previamente invisíveis com geometria adversária e 88% em um conjunto de objetos domésticos que foram movidos durante a tentativa de agarrar. Também alcançamos 81% de precisão ao lidar com a desordem dinâmica. "
p Leitner disse que a abordagem superou uma série de limitações das técnicas atuais de compreensão de aprendizado profundo.
p "Por exemplo, no Desafio de Seleção da Amazon, que nossa equipe venceu em 2017, nosso robô CartMan olharia para uma caixa de objetos, tomar uma decisão sobre onde é o melhor lugar para agarrar um objeto e, em seguida, entrar às cegas para tentar pegá-lo, " ele disse
p "Usando este novo método, podemos processar imagens dos objetos que um robô vê em cerca de 20 milissegundos, que permite ao robô atualizar sua decisão sobre onde agarrar um objeto e então fazê-lo com um propósito muito maior. Isso é particularmente importante em espaços desordenados, " ele disse.
 p Crédito:Queensland University of Technology
p Crédito:Queensland University of Technology
p O Dr. Leitner disse que as melhorias seriam valiosas para a automação industrial e em ambientes domésticos.
p “Esta linha de pesquisa nos permite usar sistemas robóticos não apenas em ambientes estruturados onde toda a fábrica é construída com base em recursos robóticos. Também nos permite agarrar objetos em ambientes não estruturados, onde as coisas não são perfeitamente planejadas e ordenadas, e os robôs são obrigados a se adaptar às mudanças.
p "Isso traz benefícios para a indústria - de depósitos para compras e classificação online, até a colheita de frutas. Também pode ser aplicado em casa, à medida que robôs mais inteligentes são desenvolvidos não apenas para aspirar ou esfregar o chão, mas também para pegar itens e guardá-los. "
p O artigo da equipe Closing the Loop for Robotic Grasping:A Real-time, O Generative Grasp Synthesis Approach será apresentado esta semana em Robotics:Science and Systems, a conferência internacional de robótica mais seletiva, que está sendo realizado na Carnegie Mellon University em Pittsburgh, EUA.