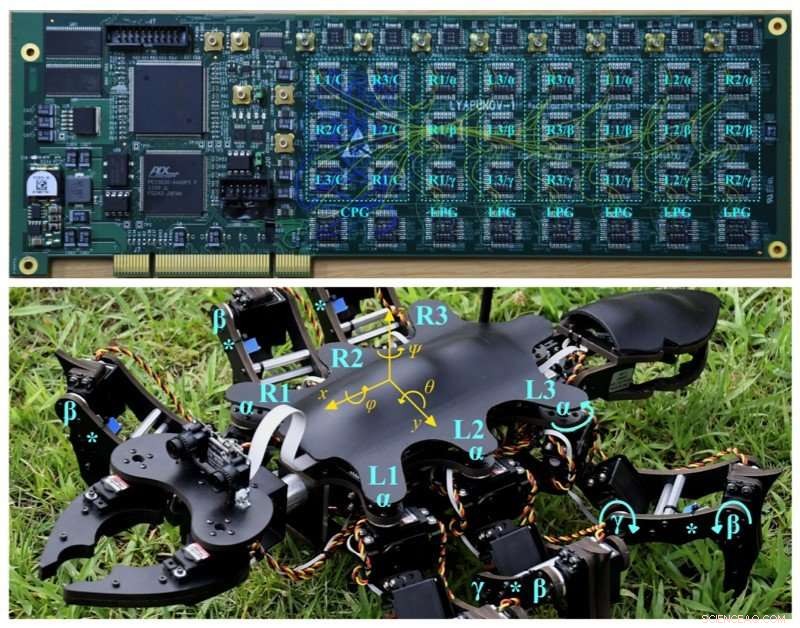
Vistas da placa de circuito que implementa o controlador e do robô. (Reproduzido com permissão de artigo publicado). Crédito:IEEE ACCESS
Um estudo liderado por pesquisadores do Instituto de Tecnologia de Tóquio (Tokyo Tech) descobriu novas maneiras de conduzir robôs de várias pernas por meio de um controlador de dois níveis. O controlador proposto utiliza uma rede dos chamados osciladores não lineares que possibilita a geração de andamentos e posturas diversas, que são especificados por apenas alguns parâmetros de alto nível. O estudo inspira novas pesquisas sobre como robôs com várias pernas podem ser controlados, incluindo no futuro usando interfaces cérebro-computador.
No mundo natural, muitas espécies podem andar em encostas e superfícies irregulares, alcançando lugares inacessíveis até mesmo para os robôs rover mais avançados. Permanece um mistério como movimentos complexos são manipulados tão perfeitamente, mesmo pelas criaturas mais ínfimas.
O que sabemos é que mesmo os cérebros mais simples contêm circuitos geradores de padrões (CPGs), que são conectados especificamente para gerar padrões de caminhada. As tentativas de replicar esses circuitos artificialmente tiveram até agora sucesso limitado, devido à pouca flexibilidade.
Agora, pesquisadores no Japão e na Itália propõem uma nova abordagem para a geração de padrões de caminhada, com base em uma rede hierárquica de osciladores eletrônicos dispostos em dois níveis, que eles demonstraram usando um robô hexápode parecido com uma formiga. A conquista abre novos caminhos para o controle de robôs com pernas. Publicado em Acesso IEEE , a pesquisa é o resultado da colaboração entre cientistas da Tokyo Tech, em parte financiado pela World Research Hub Initiative, a Academia Polonesa de Ciências em Cracóvia, Polônia, e a Universidade de Catania, Itália.
O controlador de inspiração biológica consiste em dois níveis. No topo, contém um CPG, responsável por controlar a sequência geral dos movimentos das pernas, conhecido como marcha. No fundo, ele contém seis geradores de padrões locais (LPGs), responsável por controlar as trajetórias das pernas individuais.
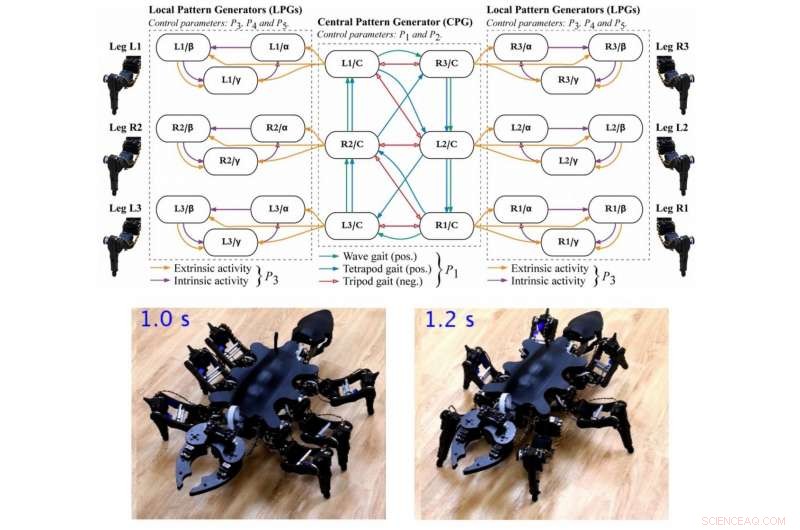
Acima:Arquitetura do controlador, mostrando o gerador de padrão central, que controla o padrão geral de marcha, e em ambos os lados, os seis geradores de padrões locais, que controlam as trajetórias individuais das pernas. Embaixo:Imagens estáticas representativas do robô caminhando em uma postura de formiga (esquerda) e uma postura de barata (direita). Crédito:IEEE ACCESS
O principal autor do estudo, Ludovico Minati, que também é afiliado à Academia Polonesa de Ciências de Cracóvia, A Polônia e convidada para o Instituto de Pesquisa Inovadora (IIR) da Tokyo Tech através da World Research Hub Initiative explica que os insetos podem adaptar rapidamente sua marcha dependendo de uma ampla gama de fatores, mas particularmente sua velocidade de caminhada. Algumas andaduras são observadas com frequência e são consideradas canônicas, Mas na realidade, um número quase infinito de andamentos está disponível, e diferentes insetos, como formigas e baratas, realizam andadas semelhantes em posturas muito diferentes.
Foram encontradas dificuldades ao tentar condensar tanta complexidade em geradores de padrões artificiais. O controlador proposto mostra um nível extremamente alto de versatilidade graças à implementação baseada em matrizes analógicas programáveis em campo (FPAAs), que permitem reconfiguração e ajuste em tempo real de todos os parâmetros do circuito. Baseia-se em anos de pesquisas anteriores sobre redes eletrônicas não lineares e caóticas, que demonstrou sua capacidade de replicar fenômenos observados em cérebros biológicos, mesmo quando conectado em configurações muito simples.
"Talvez o momento mais emocionante da pesquisa tenha sido quando observamos os fenômenos de exibição do robô e andamentos que não projetamos nem esperávamos, e mais tarde descobri que também existem em insetos biológicos, "diz Minati. Tais fenômenos emergentes surgem principalmente porque a rede é realizada com componentes analógicos e permite um certo grau de auto-organização, representando uma abordagem que difere muito da engenharia convencional, onde tudo é projetado a priori e consertado. "Isso nos aproxima muito da forma como a biologia funciona, " ele adiciona.
Yasuharu Koike, também baseado no IIR, comentários:"Um aspecto importante do controlador é que ele condensa muita complexidade em apenas um pequeno número de parâmetros. Estes podem ser considerados parâmetros de alto nível, na medida em que definem explicitamente a marcha, Rapidez, postura, etc. Porque eles podem ser alterados dinamicamente, no futuro, deve ser fácil alterá-los em tempo real usando uma interface cérebro-computador, permitindo o controle de cinemática complexa, de outra forma impossível de dominar com as abordagens atuais. "
E Natsue Yoshimura, também baseado no IIR, diz:"À medida que o controlador responde gradualmente e incorpora uma abordagem biologicamente plausível para a geração de padrões, pensamos que pode ser mais fácil dirigir em comparação com sistemas que decodificam comandos discretos. Isso pode ter implicações práticas, e nosso laboratório tem amplo know-how nesta área. "