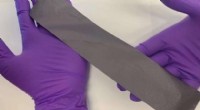
p Os pesquisadores já descreveram uma nova lei da física que explica o atrito da lubrificação elasto-hidrodinâmica (EHL), que deve promover uma ampla gama de tecnologias robóticas. O atrito EHL ocorre quando duas superfícies sólidas entram em contato com uma fina camada de fluido entre elas. Crédito:Lilian Hsiao
p Os pesquisadores já descreveram uma nova lei da física que explica o atrito da lubrificação elasto-hidrodinâmica (EHL), que deve promover uma ampla gama de tecnologias robóticas. O atrito EHL ocorre quando duas superfícies sólidas entram em contato com uma fina camada de fluido entre elas. Crédito:Lilian Hsiao
p Embora os dispositivos robóticos sejam usados em tudo, desde linhas de montagem até medicamentos, os engenheiros têm dificuldade em explicar o atrito que ocorre quando esses robôs agarram objetos - especialmente em ambientes úmidos. Os pesquisadores descobriram agora uma nova lei da física que explica esse tipo de atrito, que deve promover uma ampla gama de tecnologias robóticas. p "Nosso trabalho aqui abre a porta para a criação de dispositivos hápticos e robóticos mais confiáveis e funcionais em aplicações como telecirurgia e manufatura, "diz Lilian Hsiao, professor assistente de engenharia química e biomolecular na North Carolina State University e autor correspondente de um artigo sobre o trabalho.
p Em questão está algo chamado de fricção de lubrificação elasto-hidrodinâmica (EHL), que é o atrito que ocorre quando duas superfícies sólidas entram em contato com uma fina camada de fluido entre elas. Isso inclui o atrito que ocorre quando você esfrega as pontas dos dedos uma na outra, com o fluido sendo a fina camada de óleo que ocorre naturalmente em sua pele. Mas também pode se aplicar a uma garra robótica levantando um objeto que foi coberto com óleo, ou a um dispositivo cirúrgico que está sendo usado dentro do corpo humano.
p Uma das razões pelas quais o atrito é importante é porque nos ajuda a segurar as coisas sem deixá-las cair.
p "Entender o atrito é intuitivo para os humanos - mesmo quando estamos manuseando pratos com sabão, "Hsiao diz." Mas é extremamente difícil contabilizar o atrito EHL ao desenvolver materiais que controlam as capacidades de agarrar em robôs. "
p Para desenvolver materiais que ajudem a controlar o atrito EHL, engenheiros precisariam de uma estrutura que pudesse ser aplicada uniformemente a uma ampla variedade de padrões, materiais e condições operacionais dinâmicas. E é exatamente isso que os pesquisadores descobriram.
p "Esta lei pode ser usada para explicar o atrito EHL, e pode ser aplicado a muitos sistemas soft diferentes - desde que as superfícies dos objetos sejam padronizadas, "Hsiao diz.
p Nesse contexto, padrões de superfície podem ser qualquer coisa, desde superfícies ligeiramente levantadas nas pontas de nossos dedos até sulcos na superfície de uma ferramenta robótica.
p O novo princípio físico, desenvolvido em conjunto por Hsiao e seu aluno de graduação Yunhu Peng, faz uso de quatro equações para explicar todas as forças físicas em jogo na compreensão do atrito EHL. No papel, a equipe de pesquisa demonstrou a lei em três sistemas:dedos humanos; uma ponta de dedo robótica bioinspirada; e uma ferramenta chamada triborreômetro, que é usado para medir forças de atrito. Peng é o primeiro autor do artigo.
p "Esses resultados são muito úteis em mãos robóticas que têm controles mais diferenciados para lidar com processos de manufatura de maneira confiável, "Hsiao diz." E tem aplicações óbvias no reino da telecirurgia, em que cirurgiões controlam remotamente dispositivos robóticos para realizar procedimentos cirúrgicos. Vemos isso como um avanço fundamental para a compreensão do toque e para o controle do toque em sistemas sintéticos. "
p O papel, "Fricção elasto-hidrodinâmica de dedos robóticos e humanos em substratos micropadronizados macios, "é publicado em
Materiais da Natureza .