Um robô saltador para explorar o terreno perigoso da lua
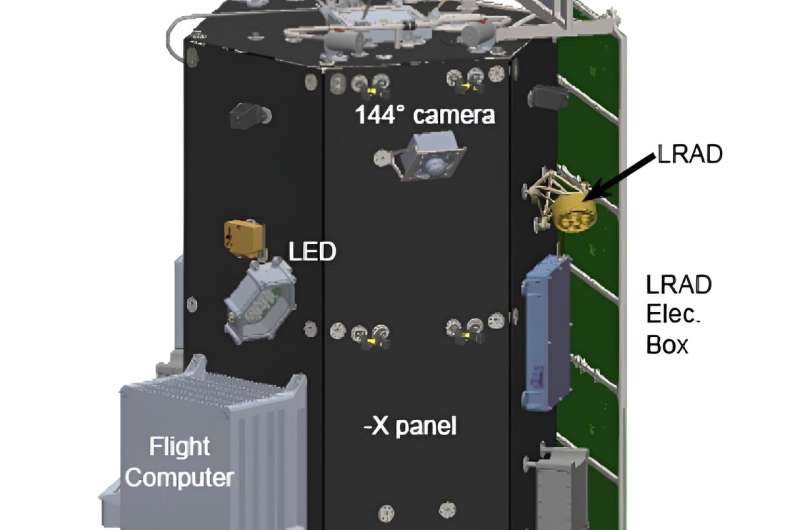 Vista do S.P Hopper. Crédito:Martin et al.
Vista do S.P Hopper. Crédito:Martin et al.
A Intuitive Machines teve recentemente um grande avanço, tornando-se com sucesso a primeira entidade não governamental a pousar na Lua em fevereiro. Pelo menos o pouso foi parcialmente bem-sucedido – o módulo de pouso Odysseus da empresa acabou tombado, embora seus instrumentos e links de comunicação permanecessem pelo menos parcialmente funcionais. Essa missão, batizada de IM-1, foi a primeira de uma série de missões ambiciosas que a empresa planejou. E eles lançaram recentemente um artigo na conferência LPSC 2024 detalhando as características de um robô saltitante exclusivo que pegará carona em sua próxima missão lunar.