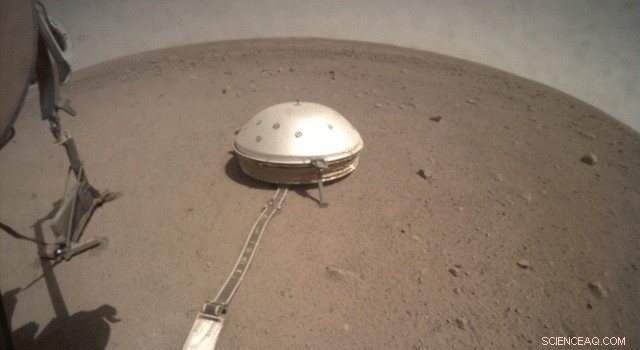
Em 28 de junho, 2019, A sonda InSight da NASA usou seu braço robótico para mover a estrutura de suporte de seu instrumento de escavação, informalmente chamado de "toupeira". Esta visão foi capturada pela Fisheye Instrument Context Camera sob o deck do módulo de pouso. Crédito:NASA / JPL-Caltech
Contemple a "toupeira":o pico de detecção de calor que a sonda InSight da NASA implantou na superfície marciana agora é visível. Semana Anterior, o braço robótico da espaçonave removeu com sucesso a estrutura de suporte da toupeira, que foi incapaz de cavar, e colocou-o ao lado. Tirar a estrutura do caminho dá à equipe da missão uma visão da toupeira - e talvez uma maneira de ajudá-la a cavar.
"Concluímos a primeira etapa do nosso plano para salvar a toupeira, "disse Troy Hudson sobre um cientista e engenheiro da missão InSight no Laboratório de Propulsão a Jato da NASA em Pasadena, Califórnia. "Ainda não terminamos. Mas, por enquanto, toda a equipe está exultante porque estamos muito mais perto de fazer a toupeira se mover novamente. "
Parte de um instrumento denominado Pacote de Fluxo de Calor e Propriedades Físicas (HP3), a toupeira com martelo automático foi projetada para cavar até 5 metros e medir a temperatura de Marte. Mas a toupeira não foi capaz de cavar mais fundo do que cerca de 30 centímetros, então, em 28 de fevereiro, Em 2019, a equipe ordenou que o instrumento parasse de martelar para que pudessem determinar um caminho a seguir.
Cientistas e engenheiros têm conduzido testes para salvar a toupeira no JPL, que lidera a missão InSight, bem como no Centro Aeroespacial Alemão (DLR), que forneceu HP3. Com base em testes DLR, o solo pode não fornecer o tipo de atrito para o qual a toupeira foi projetada. Sem atrito para equilibrar o recuo do movimento de martelamento automático, a toupeira simplesmente pularia no lugar em vez de cavar.
Um sinal desse tipo de solo inesperado é aparente nas imagens tiradas por uma câmera no braço robótico:um pequeno buraco formou-se ao redor da toupeira enquanto ela martelava no lugar.
"As imagens que voltam de Marte confirmam o que vimos em nossos testes aqui na Terra, "disse Mattias Grott, cientista do projeto HP3, da DLR." Nossos cálculos estavam corretos:este solo coeso está se compactando nas paredes à medida que a toupeira martela. "
A equipe quer pressionar o solo perto deste poço usando uma pequena concha na extremidade do braço robótico. A esperança é que isso desmorone o buraco e forneça o atrito necessário para a toupeira cavar.
Também é possível que a toupeira tenha atingido uma rocha. Embora a toupeira seja projetada para empurrar pequenas pedras para fora do caminho ou desviar em torno delas, os maiores impedirão o avanço do pico. É por isso que a missão selecionou cuidadosamente um local de pouso que provavelmente teria menos rochas em geral e outras menores perto da superfície.
A garra do braço robótico não foi projetada para levantar a toupeira, uma vez que está fora de sua estrutura de suporte, portanto, não será capaz de realocar a toupeira se uma pedra a estiver bloqueando.
A equipe discutirá quais são os próximos passos a serem tomados com base em uma análise cuidadosa. Ainda este mês, depois de soltar a garra do braço da estrutura de suporte, eles vão trazer uma câmera para algumas imagens detalhadas da toupeira.