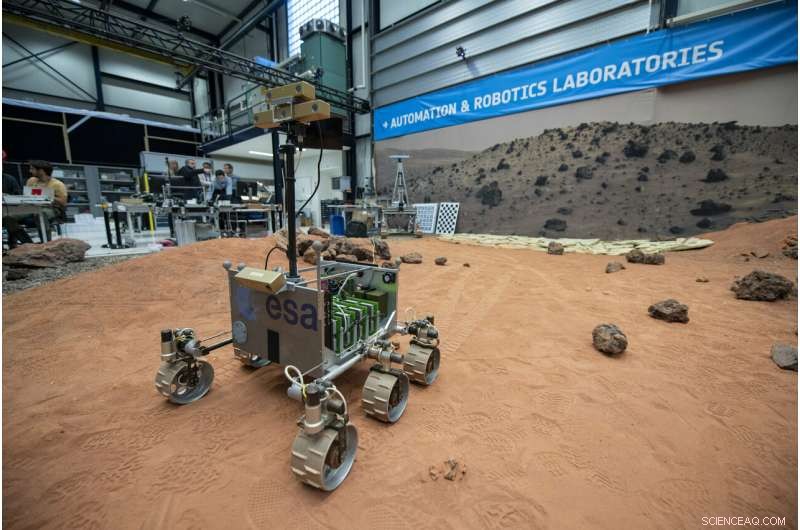
 p Uma versão em meia escala do rover ExoMars, chamado ExoMars Testing Rover (ExoTeR), visto manobrando-se cuidadosamente através das rochas vermelhas e areia da bancada de teste de utilização planetária de 9x9 m, parte do Laboratório de Robótica Planetária da ESA em seu centro técnico ESTEC na Holanda, como um teste de software de navegação autônomo destinado à missão ExoMars 2020 da ESA ao Planeta Vermelho. Crédito:ESA – G. Porteiro, CC BY-SA 3.0 IGO
p Uma versão em meia escala do rover ExoMars, chamado ExoMars Testing Rover (ExoTeR), visto manobrando-se cuidadosamente através das rochas vermelhas e areia da bancada de teste de utilização planetária de 9x9 m, parte do Laboratório de Robótica Planetária da ESA em seu centro técnico ESTEC na Holanda, como um teste de software de navegação autônomo destinado à missão ExoMars 2020 da ESA ao Planeta Vermelho. Crédito:ESA – G. Porteiro, CC BY-SA 3.0 IGO
p O software de navegação destinado à missão ExoMars 2020 ao Planeta Vermelho foi aprovado em um teste de direção baseado em rover no 'Mars Yard' da ESA. p O rover ExoMars da ESA irá dirigir-se a vários locais e perfurar até dois metros abaixo da superfície de Marte em busca de pistas para vidas passadas preservadas no subsolo.
p Uma versão em meia escala do rover ExoMars, chamado ExoMars Testing Rover (ExoTeR), manobrou-se cuidadosamente através das rochas vermelhas e areia do 'Banco de Teste de Utilização Planetária' de 9 x 9 m, apelidado de Mars Yard, parte do Laboratório de Robótica Planetária da ESA no ESTEC na Holanda.
p Calculando cuidadosamente sua rota de avanço, O ExoTeR progrediu a uma taxa de 2 m por minuto - ainda várias vezes mais rápido do que o rover ExoMars real irá dirigir, que irá progredir a 100 m por dia marciano.
p O teste de rover de dois dias foi conduzido por engenheiros robóticos da ESA, juntou-se a uma equipe da agência espacial francesa CNES em Toulouse. Eles têm mais de duas décadas de experiência em navegação autônoma para rovers planetários, culminando no desenvolvimento do pacote de software 'AutoNav' que fazia a direção.
p Durante 2017, o ExoTeR foi passado para a ALTEC na Itália, o local do centro de monitoramento e controle de rover da ExoMars, para permitir que a equipe de controle treine com o rover avançado. Em dezembro, o rover voltou ao ESTEC para uma atualização de seu algoritmo de navegação autônomo.
Teste de condução automática do software ExoMars rover. Crédito:Agência Espacial Europeia p O teste de navegação seguido, confirmando que o software estava funcionando bem. O próximo ExoTeR retornará à Itália, permitindo que a equipe de controle do ALTEC ganhe experiência trabalhando com a funcionalidade adicional de navegação autônoma.
p A enorme distância da Terra a Marte equivale a um atraso de sinal entre quatro e 24 minutos, tornando o controle direto de ExoMars impraticável. Em vez disso, o rover será capaz de tomar algumas de suas próprias decisões.
p "Em vez de enviar trajetórias completas sem perigo para o rover seguir, a navegação autônoma nos permite enviar apenas um ponto de destino, "explica o engenheiro de robótica da ESA, Luc Joudrier.
p "O rover cria um mapa digital de sua vizinhança e calcula a melhor forma de alcançar aquele ponto-alvo. Olhando para o mapa, ele tenta colocar o rover em todos esses locais adjacentes para descobrir se o rover estaria seguro em cada uma dessas posições - ou se as rochas forem muito altas ou o terreno muito íngreme.
 p Uma versão em meia escala do rover ExoMars, chamado ExoMars Testing Rover (ExoTeR), sendo usado para testar o software de navegação autônomo desenvolvido pelo CNES nas rochas vermelhas e na areia da bancada de teste de utilização planetária de 9x9 m, parte do Laboratório de Robótica Planetária da ESA no seu centro técnico ESTEC na Holanda. Crédito:ESA – G. Porteiro, CC BY-SA 3.0 IGO
p Uma versão em meia escala do rover ExoMars, chamado ExoMars Testing Rover (ExoTeR), sendo usado para testar o software de navegação autônomo desenvolvido pelo CNES nas rochas vermelhas e na areia da bancada de teste de utilização planetária de 9x9 m, parte do Laboratório de Robótica Planetária da ESA no seu centro técnico ESTEC na Holanda. Crédito:ESA – G. Porteiro, CC BY-SA 3.0 IGO
p "Trabalhando a partir do mapa de navegação local, o rover calcula o caminho seguro em direção ao objetivo e começa a se mover ao longo de um segmento do caminho calculado, no final do segmento, ele repete o mesmo processo de mapeamento para o progresso.
p "É semelhante a um caminhar humano. Olhamos para frente para decidir para onde vamos, mas à medida que caminhamos olhamos para os nossos pés e, se necessário, mudamos o curso para evitar obstáculos. Depois de escolher um caminho sem obstáculos, certificamo-nos de seguir esse caminho para permanecermos seguros. "
p O rover ExoTeR, como o próprio rover ExoMars, é equipado com câmeras de navegação estéreo montadas em mastros para mapeamento digital de elevação. E à medida que avança, ele verifica constantemente seu progresso usando um par de câmeras em seu chassi frontal.
p Este rastreamento de movimento baseado em visão funciona melhor do que simplesmente medir a rotação das rodas do rover, pois permite que os controladores levem em consideração qualquer deslizamento das rodas - os rovers em Marte já foram pegos na areia profunda, e continuar girando as rodas pode realmente cavá-los mais profundamente.
 p O rover ExoTeR, como o próprio rover ExoMars, é equipado com câmeras de navegação estéreo montadas em mastros para mapeamento digital de elevação. Crédito:ESA – G. Porteiro, CC BY-SA 3.0 IGO
p O rover ExoTeR, como o próprio rover ExoMars, é equipado com câmeras de navegação estéreo montadas em mastros para mapeamento digital de elevação. Crédito:ESA – G. Porteiro, CC BY-SA 3.0 IGO
p O rover ExoTeR, completo com software atualizado, agora está definido para retornar à ALTEC na Itália, permitindo que a equipe de controle ganhe experiência com a funcionalidade adicional de navegação autônoma antes da conclusão do software de vôo do ExoMars.
p O software de voo final do ExoMars irá, na verdade, transportar dois conjuntos de software de navegação autônomo, com outro desenvolvido pela Airbus em Stevenage, REINO UNIDO.
p "A combinação deve dar ao rover mais flexibilidade, "diz Luc." A ideia é que alguém possa ter um desempenho melhor em terrenos mais difíceis, enquanto o outro poderia se mover mais rápido em terreno mais fácil. "