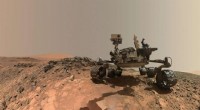
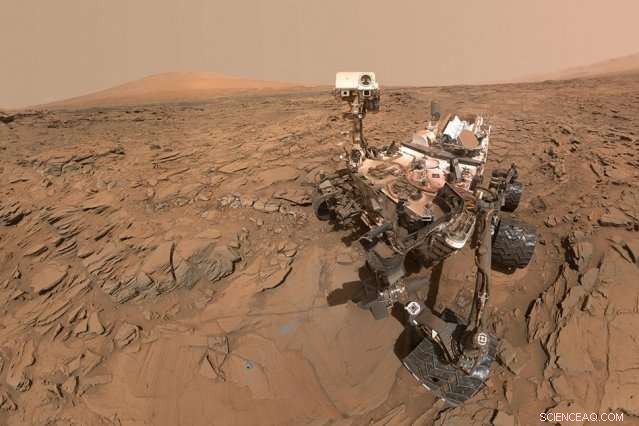
 p Um autorretrato do rover Curiosity Mars da NASA. Crédito:NASA / JPL-Caltech / MSSS
p Um autorretrato do rover Curiosity Mars da NASA. Crédito:NASA / JPL-Caltech / MSSS
p A seleção de um local de pouso para um rover com destino a Marte é um processo demorado que normalmente envolve grandes comitês de cientistas e engenheiros. Esses comitês normalmente passam vários anos pesando os objetivos científicos de uma missão e as restrições de engenharia de um veículo, para identificar sites que sejam cientificamente interessantes e seguros para pousar. p Por exemplo, a equipe científica de uma missão pode querer explorar certos locais geológicos em busca de sinais de água, vida, e habitabilidade. Mas os engenheiros podem achar que esses locais são muito íngremes para um veículo pousar com segurança, ou os locais podem não receber luz solar suficiente para alimentar os painéis solares do veículo após a aterrissagem. Encontrar um local de pouso adequado, portanto, envolve reunir informações coletadas ao longo dos anos por missões anteriores a Marte. Estes dados, embora cresça a cada missão, são irregulares e incompletos.
p Agora, os pesquisadores do MIT desenvolveram uma ferramenta de software para descoberta auxiliada por computador que pode ajudar os planejadores de missão a tomar essas decisões. Ele produz automaticamente mapas de locais de pouso favoráveis, usando os dados disponíveis sobre a geologia e o terreno de Marte, bem como uma lista de prioridades científicas e restrições de engenharia que um usuário pode especificar.
p Como um exemplo, um usuário pode estipular que um rover deve pousar em um local onde pode explorar certos alvos geológicos, como lagos de bacia aberta. Ao mesmo tempo, o local de pouso não deve exceder uma certa inclinação, caso contrário, o veículo tombaria ao tentar pousar. O programa então gera um "mapa de favorabilidade" de locais de pouso que atendem a ambas as restrições. Esses locais podem mudar e mudar conforme um usuário adiciona especificações adicionais.
p O programa também pode traçar caminhos possíveis que um rover pode seguir de um determinado local de pouso até certas características geológicas. Por exemplo, se um usuário especifica que um rover deve explorar exposições de rochas sedimentares, o programa produz caminhos para quaisquer estruturas próximas e calcula o tempo que levaria para alcançá-las.
p Victor Pankratius, principal cientista pesquisador do Instituto Kavli de Astrofísica e Pesquisa Espacial do MIT, diz que os planejadores de missão podem usar o programa para considerar de forma rápida e eficiente diferentes cenários de pouso e exploratório.
p "Isso nunca vai substituir o comitê real, mas pode tornar as coisas muito mais eficientes, porque você pode brincar com diferentes cenários enquanto fala, "Pankratius diz.
p O estudo da equipe foi publicado online em 31 de agosto por
Ciências da Terra e do Espaço e faz parte da edição online de 8 de setembro da revista.
p
Novos sites
p Pankratius e pós-doutorado Guillaume Rongier, no Departamento da Terra do MIT, Ciências Atmosféricas e Planetárias, criou o programa para identificar locais de pouso favoráveis para uma missão conceitual semelhante ao rover Mars 2020 da NASA, que é projetado para pousar na horizontal, até, áreas livres de poeira e visa explorar um antigo, potencialmente habitável, local com afloramentos magmáticos.
p Eles descobriram que o programa identificou muitos locais de pouso para o rover que foram considerados no passado, e destacou outros locais de pouso promissores que raramente eram propostos. "Vemos que existem locais que poderíamos explorar com as tecnologias de rover existentes, que os comitês do local de pouso podem querer reconsiderar, "Pankratius diz.
p O programa também pode ser usado para explorar os requisitos de engenharia para as futuras gerações de rovers de Marte. "Supondo que você possa pousar em curvas mais íngremes, ou dirija mais rápido, então podemos derivar quais novas regiões você pode explorar, "Pankratius diz.
p
Uma aterrissagem difusa
p O software depende parcialmente da "lógica difusa, "um esquema de lógica matemática que agrupa as coisas não de uma forma binária como a lógica booleana, como sim / não, verdadeiro falso, ou seguro / inseguro, mas de uma forma mais fluida, moda baseada em probabilidade.
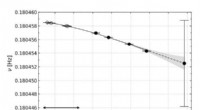
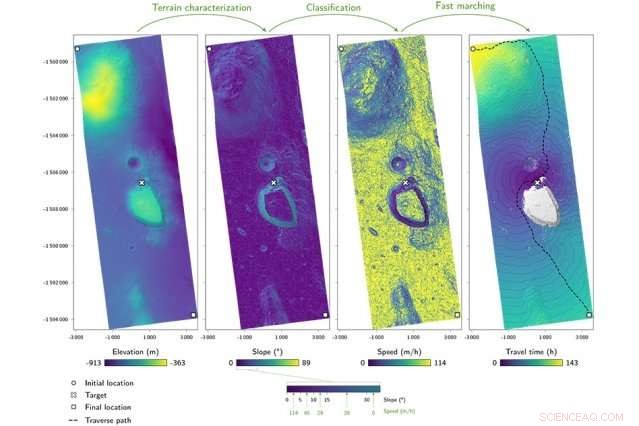 p A figura mostra as etapas sucessivas para imitar um rover dirigindo em torno de Marte. Os pesquisadores do MIT desenvolveram um método para primeiro caracterizar o terreno sobre a área de interesse. Com base nessa caracterização e nas características do rover, eles usam um algoritmo de “marcha rápida” para estimar a velocidade do rover, que eles usam para calcular o tempo que leva para dirigir em qualquer lugar nessa área. Eles também podem estimar o caminho mais curto de um local inicial, para um alvo, para um local final. Crédito:NASA / JPL / Universidade do Arizona, Guillaume Rongier
p A figura mostra as etapas sucessivas para imitar um rover dirigindo em torno de Marte. Os pesquisadores do MIT desenvolveram um método para primeiro caracterizar o terreno sobre a área de interesse. Com base nessa caracterização e nas características do rover, eles usam um algoritmo de “marcha rápida” para estimar a velocidade do rover, que eles usam para calcular o tempo que leva para dirigir em qualquer lugar nessa área. Eles também podem estimar o caminho mais curto de um local inicial, para um alvo, para um local final. Crédito:NASA / JPL / Universidade do Arizona, Guillaume Rongier
p "Tradicionalmente, essa ideia vem da matemática, onde em vez de dizer que um elemento pertence a um conjunto, sim ou não, a lógica difusa diz que pertence a uma certa probabilidade, "refletindo assim informações incompletas ou imprecisas, Pankratius explica.
p No contexto de encontrar um local de pouso adequado, o programa calcula a probabilidade de que um rover pode subir uma certa inclinação, com a probabilidade diminuindo conforme o local se torna mais íngreme.
p "Com a lógica difusa, podemos expressar essa probabilidade espacialmente - quão ruim é se eu for tão íngreme, contra este íngreme, "Pankratius diz." É uma maneira de lidar com a imprecisão, de certa forma. "
p Usando algoritmos relacionados à lógica fuzzy, a equipe cria cru, ou inicial, mapas de favorabilidade de possíveis locais de pouso em todo o planeta. Esses mapas são divididos em grades em células individuais, cada um representando cerca de 3 quilômetros quadrados na superfície de Marte. O programa calcula, para cada célula, a probabilidade de ser um local de pouso favorável, e gera um mapa com graduação de cores para representar probabilidades entre 0 e 1. Células mais escuras representam locais com uma probabilidade próxima de zero de ser um local de pouso favorável, enquanto locais mais leves têm uma chance maior de um pouso seguro com perspectivas científicas interessantes.
p Depois de gerar um mapa bruto de possíveis locais de pouso, os pesquisadores levam em consideração várias incertezas no local de pouso, como mudanças na trajetória e possíveis erros de navegação durante a descida. Considerando essas incertezas, o programa então gera elipses de aterrissagem, ou alvos circulares onde um rover provavelmente pousará para maximizar a segurança e a exploração científica.
p O programa também usa um algoritmo conhecido como marcha rápida para mapear os caminhos que um rover pode tomar sobre um determinado terreno depois de pousar. A marcha rápida é normalmente usada para calcular a propagação de uma frente, como a velocidade com que uma frente de vento atinge a costa se viajar a uma determinada velocidade. Pela primeira vez, Pankratius e Rongier aplicaram marcha rápida para calcular o tempo de viagem de um rover enquanto ele viaja de um ponto de partida para uma estrutura geológica de interesse.
p "Se você estiver em algum lugar em Marte e obtiver este mapa processado, você pode perguntar, 'Daqui, quão rápido posso ir para qualquer ponto ao meu redor? E este algoritmo irá dizer a você, "Pankratius diz.
p O algoritmo também pode mapear rotas para evitar certos obstáculos que podem retardar a viagem de um rover, e mapear as probabilidades de atingir certos tipos de estruturas geológicas em uma área de pouso.
p "É mais difícil para um veículo espacial dirigir na poeira, então ele vai em um ritmo mais lento, e a poeira não está necessariamente em todos os lugares, apenas em patches, "Rongier diz." O algoritmo levará em consideração esses obstáculos ao mapear os caminhos de travessia mais rápidos. "
p As equipes afirmam que os operadores dos veículos espaciais atuais na superfície marciana podem usar o programa de software para direcionar os veículos de forma mais eficiente para locais de interesse científico. No futuro, Pankratius prevê que essa técnica ou algo semelhante seja integrado a veículos cada vez mais autônomos que não exigem que os humanos operem os veículos o tempo todo da Terra.
p "Um dia, se tivermos rovers totalmente autônomos, eles podem levar em consideração todas essas coisas para saber aonde podem ir, e ser capaz de se adaptar a situações imprevistas, "Pankratius diz." Você quer autonomia, caso contrário, pode levar muito tempo para se comunicar quando você precisa tomar decisões críticas rapidamente. "
p A equipe também está investigando as aplicações das técnicas de exploração de locais geotérmicos na Terra em colaboração com o Laboratório de Recursos Terrestres do MIT no Departamento da Terra, Ciências Atmosféricas e Planetárias.
p "É um problema muito semelhante, "Pankratius diz." Em vez de dizer 'Este é um bom site, sim ou não?' Você pode dizer, 'Mostre-me um mapa de todas as áreas que provavelmente seriam viáveis para a exploração geotérmica.' "
p Conforme os dados melhoram, tanto para Marte quanto para estruturas geotérmicas na Terra, ele diz que esses dados podem ser inseridos no programa existente para fornecer análises mais precisas.
p "O programa é incrementalmente aprimorável, " ele diz. p
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.