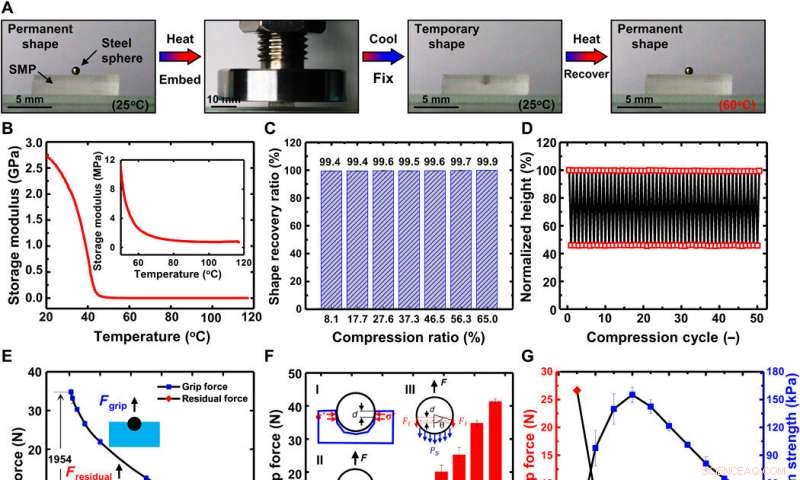
Caracterização do material epóxi SMP e da pinça SMP. (A) Demonstração da fixação de forma temporária e efeito de memória de forma permanente do SMP. (B) Módulo de armazenamento versus temperatura do material SMP. Inserções:Ampliação do módulo de armazenamento em relação à temperatura em temperaturas mais altas. (C) Taxa de recuperação de forma do SMP sob diferentes taxas de compressão. (D) Desempenho do SMP sob compressão repetida. (E) Comparação das forças de empunhadura e residual em função das velocidades de empunhadura. Parâmetros para a medição da força de preensão:temperatura para incorporação, 120 ° C; temperatura para puxar, 30 ° C; profundidade de incorporação, 3 mm; diâmetro do indentador, 5 mm. (F) Influência do ângulo de embutimento na força de preensão (temperatura para embutimento, 120 ° C; temperatura para puxar, 30 ° C; diâmetro do indentador, 5 mm; velocidade de aderência, 100 μm / s). As inserções mostram o mecanismo subjacente da preensão. (I e II) Ilustrações de perfil mostrando a evolução da configuração da garra SMP e do sistema de esferas embutidas durante o processo de preensão. (III) Diagrama de força da esfera embutida na direção vertical. (G) Influência da temperatura na força de preensão. A linha com losangos vermelhos dá a força de preensão, enquanto a linha marcada por quadrados azuis mostra a adesão. A força de preensão é obtida a partir dos testes de incorporação e extração (temperatura para incorporação, 120 ° C; temperatura para puxar, 30 ° C; diâmetro do indentador, 5 mm; profundidade de incorporação, 3 mm; velocidade de aderência, 1000 μm / s), enquanto a força de adesão sob a mesma velocidade de separação (1000 μm / s) é obtida por testes de tração entre uma placa de vidro e o SMP. Crédito da foto:Changhong Linghu, Universidade de Zhejiang. Crédito: Avanços da Ciência (2020). DOI:10.1126 / sciadv.aay5120
Uma equipe de pesquisadores da Universidade de Zhejiang criou uma nova garra de robô usando um polímero com memória de forma. Em seu artigo publicado na revista Avanços da Ciência , o grupo descreve o material, seu uso como uma garra, e como funcionou bem.
Nas últimas décadas, os cientistas usaram uma variedade de abordagens para dar a um robô a capacidade de pegar e manipular objetos e colocá-los de volta no chão - tudo sem danificar o objeto. Muito progresso foi feito em garras de robôs, devido principalmente aos avanços na tecnologia de microchip, mas ainda há muito espaço para melhorias. Um dos maiores desafios é desenvolver uma garra que possa pegar e manipular objetos de quase qualquer formato, tamanhos diferentes, e feito de materiais diferentes. Criar uma pinça semelhante a uma mão humana que é capaz de pegar um alfinete de uma mesa, carregar um ovo cru através de uma sala ou amarrar uma fita de criança em seu cabelo, requer uma pinça altamente sofisticada e software associado. Neste novo esforço, os pesquisadores eliminaram a necessidade de sofisticação adotando uma abordagem totalmente diferente.
Pesquisas anteriores mostraram que quando certos polímeros são aquecidos, eles se expandem ligeiramente e tornam-se macios. Os pesquisadores usaram ambas as propriedades para criar sua nova garra. Eles criaram uma pinça de polímero que amolece quando aquecida a 45 ° C e endurece novamente quando exposta a 25 ° C. Sua forma básica é cubóide (um retângulo 3-D). Eles então fixaram a pinça em um braço simples que era capaz de colocá-la contra a mesa ou levantá-la logo acima da mesa - o suficiente para permitir a colocação de vários objetos embaixo.
O teste envolveu a colocação de um objeto como uma pequena bola de aço sob a garra e o aquecimento de todo o aparelho em um gabinete a 45 ° C. Depois de alguns minutos, o polímero havia amolecido. Os pesquisadores então baixaram a garra para o objeto, permitir que o objeto seja envolvido - semelhante a colocar um pedaço de manteiga amolecida em um garfo. A temperatura no recinto foi então reduzida para 25 ° C. Nesse ponto, o polímero encolheu ligeiramente, agarrando o objeto enquanto ele se firmava. Os pesquisadores então levantaram a pinça e o objeto que ela segurava. Para colocar o objeto de volta no chão, os pesquisadores baixaram a pinça até a mesa e aumentaram a temperatura no gabinete para 45 ° C.
© 2020 Science X Network














