O robô usado neste experimento foi uma máquina da marca Minitaur com pernas. Crédito:Georgia Tech / Neveln
Ai credo, Uma barata! Mas ele dispara antes que o mata-mata apareça. Agora, pesquisadores aproveitaram as excelentes habilidades de corrida do inseto para criar um método inteligente e simples de avaliar e melhorar a locomoção em robôs.
Normalmente, modelagem tediosa de mecânica, eletrônicos, e a ciência da informação é necessária para entender como as partes móveis dos insetos ou robôs se coordenam suavemente para levá-los a lugares. Mas em um novo estudo, pesquisadores de biomecânica do Instituto de Tecnologia da Geórgia reduziram as corridas de baratas a princípios e equações úteis que eles usaram para fazer um robô de teste andar melhor.
O método disse aos pesquisadores sobre como cada perna opera por conta própria, como todos eles se unem como um todo, e a harmonia ou falta dela em como o fazem. Apesar da dinâmica de movimento totalmente divergente de bugs e bots, o novo método funcionou para ambos e deve funcionar para outros robôs e animais, também.
O robô biológico, a barata, era o corredor muito superior com sinais neurológicos guiando seis pernas impecavelmente evoluídas. O robô mecânico, um modelo de consumidor, tinha quatro pernas atarracadas e nenhum sistema nervoso, mas em vez disso, para o controle da locomoção, dependia de forças físicas grosseiras viajando através de seu chassi como sinais rudimentares para coordenar de forma grosseira sua marcha desajeitada.
"O robô era muito mais corpulento e mal conseguia sentir o ambiente. A barata tinha muitos sentidos e pode se adaptar melhor a terrenos acidentados. Solavancos tão altos quanto seus quadris não a retardariam de forma alguma, "disse Izaak Neveln, o primeiro autor do estudo, que foi pesquisador de pós-doutorado no laboratório de Simon Sponberg na Georgia Tech durante o estudo.
Simplicidade avançada
O método, ou "medir, "como o estudo chama, transcendeu essas enormes diferenças, que permeiam a robótica de inspiração animal.
"A medida é geral (universal) no sentido de que pode ser usada independentemente de os sinais serem padrões de pico neural, cinemática, tensões ou forças e não depende da relação particular entre os sinais, "escreveram os autores do estudo.
Não importa como funciona um bug ou um bot, as entradas e saídas matemáticas da medida estão sempre nas mesmas unidades. A medida nem sempre eliminará a necessidade de modelagem, mas serve para encurtar e guiar a modelagem e evitar erros angustiantes.
Os autores publicaram o estudo na revista Nature Communications em agosto de 2019. A pesquisa foi financiada pela National Science Foundation. Sponberg é professor assistente na Escola de Física da Georgia Tech e na Escola de Ciências Biológicas.
As oscilações das pernas da barata podem ser representadas graficamente de forma semelhante às oscilações de um pêndulo em ondas sinusoidais. Isso leva a uma melhor compreensão matemática da locomoção do inseto. Crédito:Georgia Tech / Sponberg / Neveln
Centralização vs. descentralização
Muitas vezes, um bot ou um animal envia muitos sinais de caminhada através de um sistema central para harmonizar a locomoção, mas nem todos os sinais são centralizados. Mesmo em humanos, embora a locomoção dependa fortemente de sinais do sistema nervoso central, alguns sinais neurais estão confinados a regiões do corpo; eles são sinais localizados.
Alguns insetos parecem se mover com pouca centralização - como percevejos, também conhecido como bengalas, cujas pernas mexem quase independentemente. Os stick bugs são corredores vacilantes.
"A ideia é que os percevejos têm o controle mais localizado do movimento, enquanto uma barata vai muito rápido e precisa manter a estabilidade, e seu controle de movimento é provavelmente mais centralizado, mais parecido com um relógio, "Neveln disse.
A forte centralização de sinais geralmente coordena melhor a locomoção. Pode ser um código viajando através da fiação de um robô elaborado, neurônios centrais de uma barata sincronizando suas pernas, ou o chassi do robô desajeitado inclinando-se para longe de uma perna batendo no chão, colocando peso na perna oposta. Os roboticistas precisam ver através das diferenças e descobrir a interação dos sinais locais e centrais de um locomotor.
Física legal
A nova "medida" faz isso ao se concentrar em um fenômeno abrangente nas pernas que andam, que pode ser visto como um pêndulo se movendo para frente e para trás. Para ótima locomoção, eles precisam sincronizar no que é chamado de oscilações de acoplamento de fase.
Uma diversão, experimento fácil ilustra esse princípio da física. Se alguns, digamos seis, metrônomos - pêndulos do ritmo do tique-taque que os professores de piano usam - estão balançando fora de sincronia, e você coloca todos eles em uma plataforma que balança livremente junto com as oscilações dos metrônomos, as oscilações serão sincronizadas em uníssono.
As fases, ou direções, de suas oscilações estão acopladas umas às outras centralizando seus impulsos mecânicos compostos através da plataforma. Este exemplo particular de acoplamento de fase é mecânico, mas também pode ser computacional ou neurológico - como na barata.
Suas pernas seriam análogas aos metrônomos oscilantes, e atividade neuromuscular central análoga à plataforma de oscilação livre. Na barata, nem todas as seis pernas balançam na mesma direção.
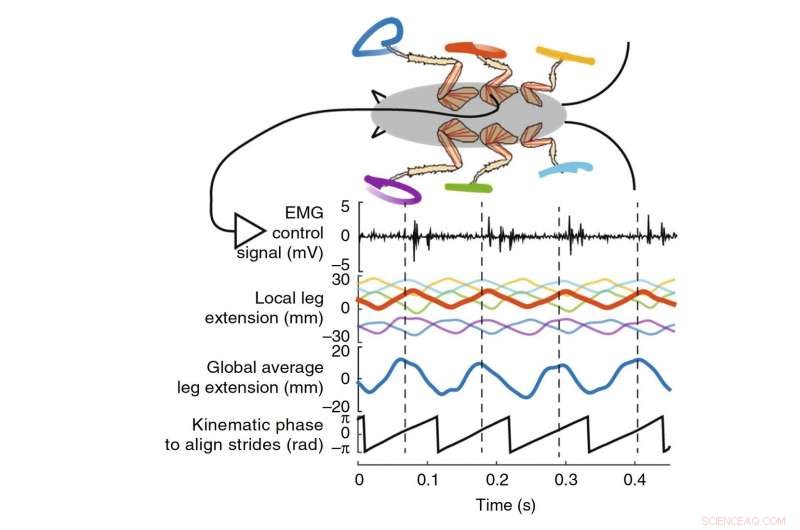
"A sincronização deles não é uniforme. Três pernas estão sincronizadas em fase uma com a outra - as pernas dianteiras e traseiras de um lado com a perna do meio do outro lado - e essas três estão sincronizadas fora de fase com as outras três, "Neveln disse." É uma marcha alternada de tripé. Um tripé de três pernas se alterna com o outro tripé de três pernas. "
Pogoing inútil
E assim como pêndula, os movimentos de cada perna podem ser representados graficamente como uma onda. Todas as ondas das pernas podem ser calculadas em uma onda de corrida de barata geral e, em seguida, desenvolvidas em matemática mais útil que relaciona centralização com descentralização e fatores como entropia, que podem jogar fora o controle de locomoção.
Os princípios e matemática resultantes beneficiaram o robô desajeitado, que tem fortes sinais descentralizados em seus motores de perna que reagem ao contato da perna com o solo, e o controle centralizado é mais fraco que o do stick bug. Os pesquisadores representaram graficamente os movimentos do robô, também, mas eles não resultaram no grupo perfeitamente sincronizado de ondas que a barata tinha.
Os pesquisadores se voltaram com os princípios e matemática para o robô desajeitado, que inicialmente estava fora de controle - resistindo ou pulando inutilmente como um pula-pula. Em seguida, os cientistas fortaleceram o controle centralizado, tornando a pesar seu chassi para torná-lo mais coerente.
"Os metrônomos na plataforma são acoplamento mecânico, e nosso robô coordena o controle dessa forma, "Neveln disse." Você pode mudar o acoplamento mecânico do robô reposicionando seus pesos. Fomos capazes de prever as mudanças que isso faria usando a medida que desenvolvemos a partir da barata. "
Surpresas de barata
Os pesquisadores também conectaram músculos e neurônios específicos de baratas para observar suas síncope com as ondas de corrida. Dezessete baratas pegaram 2, 982 passos para informar os princípios e matemática, e os insetos também surpreenderam os pesquisadores.
Um se destacou:os cientistas pensaram que a sinalização era mais centralizada quando a barata acelerou, mas ao invés, sinalização central e local fortalecida, talvez dobrando a mensagem:Corra!