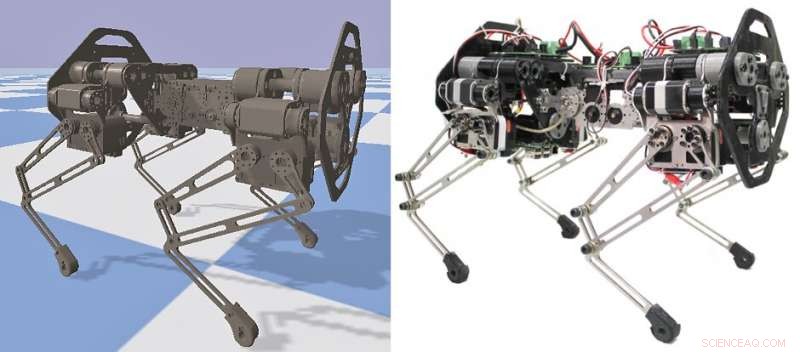
Crédito:Bhattacharya et al.
Pesquisadores do centro Robert Bosch para sistemas ciberfísicos em Bangalore, Índia, propuseram recentemente uma estrutura de simulação para estudar sistematicamente os efeitos da atuação da articulação espinhal no desempenho de locomoção de robôs quadrúpedes. Em seu estudo, descrito em um artigo pré-publicado no arXiv, eles usaram essa estrutura para investigar os comportamentos da coluna vertebral de um robô quadrúpede chamado Stoch 2 e seus efeitos em seu desempenho de limite.
"Esta pesquisa surgiu ao explorar a base da locomoção rápida em animais quadrúpedes e robôs, Shounak Bhattacharya, um dos pesquisadores que realizou o estudo, disse TechXplore. “Já se sabe há algum tempo que animais quadrúpedes de pequeno e médio porte usam a flexibilidade da coluna para melhorar a velocidade de locomoção e a eficiência energética. Esse uso da flexibilidade inspirou os roboticistas a explorar o conceito com mais detalhes para encontrar uma solução resolver este problema usando as ferramentas matemáticas disponíveis. "
Ao contrário dos pesquisadores anteriores, Bhattacharya e seus colegas começaram a investigar o comportamento da coluna vertebral de robôs quadrúpedes usando técnicas de aprendizado de máquina. O objetivo principal de seu estudo foi usar o aprendizado de reforço profundo (D-RL) para perceber a coordenação complexa entre a coluna e as pernas em robôs.
"Em uma estrutura D-RL, aprender do zero pode levar a políticas melhores e robustas do que incorporar orientação humana, "Bhattacharya disse." No entanto, aprender do zero envolve várias falhas iniciais antes da geração da política de trabalho. Nesse trabalho, mais de 2 milhões de etapas foram necessárias antes que uma política ativa e utilizável fosse obtida. "
Realizar muitos testes diretamente no hardware de um robô requer uma grande quantidade de tempo e recursos. Os pesquisadores decidiram então simular o robô e seu ambiente no PyBullet, um módulo python que aprimora o mecanismo de física Bullet com recursos de robótica e aprendizado de máquina. Em seu estudo, eles usaram o PyBullet para avaliar os efeitos da atuação da articulação espinhal no desempenho de limitação do Stoch 2, um robô espinhoso quadrúpede de 16 DOF.
“Treinamos o modelo do robô neste ambiente e observamos que o algoritmo de aprendizagem executou um treinamento completo em 4 horas, quando é executado por um máximo de 10 milhões de etapas, em um PC com Intel Core i7 de 3,5 Ghz com 12 núcleos, e 32 GB de RAM, "Bhattacharya disse." O uso de uma estrutura de simulação reduziu o tempo por treinamento e removeu a necessidade de experimentar no hardware. "
Usando PyBullet como uma estrutura de aprendizagem para seu robô, os pesquisadores alcançaram resultados muito promissores. As descobertas que eles reuniram durante as simulações sugerem que o uso ativo da coluna vertebral, na verdade, melhorar o comprimento da passada de um robô e o custo de transporte, ao mesmo tempo que reduz a frequência natural para valores mais realistas. Em última análise, Stoch 2 alcançou uma velocidade limite de 2,1 m / s, com um número máximo de Froude de 2.
Este estudo, supervisionado por quatro membros do corpo docente do Instituto Indiano de Ciência:Shishir Kolathaya, Ashitava Ghosal, Bharadwaj Amrutur e Shalabh Bhatnagar, faz parte de um projeto mais amplo chamado Walking Robot. No futuro, poderia inspirar outros pesquisadores a usar a mesma estrutura de simulação para melhorar o comportamento da coluna vertebral de seus robôs e o conseqüente desempenho de locomoção.
"Obtivemos a coordenação da coluna e da perna por meio de uma estrutura baseada em D-RL, que aumentou a eficiência energética e a velocidade do quadrúpede, "Bhattacharya disse." Deve-se notar que todos esses comportamentos foram obtidos do zero, sem qualquer compreensão da mecânica da coluna vertebral. Em nosso trabalho futuro, planejamos implantar a rede neural no hardware e executar a política aprendida diretamente. "
© 2019 Science X Network