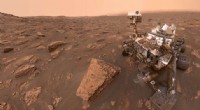
p O rover DuAxel é visto aqui participando de testes de campo no Deserto de Mojave. O rover de quatro rodas é composto por dois robôs Axel. Uma parte se ancora no lugar enquanto a outra usa uma corda para explorar o terreno de outra forma inacessível. Crédito:NASA / JPL-Caltech / J.D. Gammell
p O rover DuAxel é visto aqui participando de testes de campo no Deserto de Mojave. O rover de quatro rodas é composto por dois robôs Axel. Uma parte se ancora no lugar enquanto a outra usa uma corda para explorar o terreno de outra forma inacessível. Crédito:NASA / JPL-Caltech / J.D. Gammell
p Um rover gira sobre um terreno rochoso, suas quatro rodas de metal fazendo barulho até encontrarem um perigo aparentemente intransponível:uma encosta íngreme. Abaixo está um tesouro potencial de alvos científicos. Com um rover típico, os operadores precisariam encontrar outro alvo, mas este é DuAxel, um robô construído para situações exatamente como esta. p O rover é na verdade feito de um par de rovers de duas rodas, cada um chamado Axel. Para dividir e conquistar, o rover para, abaixa seu chassi e o fixa ao solo antes de se dividir em dois. Com a metade traseira do DuAxel (abreviação de "dual-Axel") firmemente no lugar, a metade dianteira se desencaixa e rola em um único eixo. Tudo o que conecta as duas metades agora é uma corda que se desenrola à medida que o eixo dianteiro se aproxima do perigo e desce a encosta, usando instrumentos armazenados em seu cubo de roda para estudar um local cientificamente atraente que normalmente estaria fora de alcance.
p Este cenário ocorreu no outono passado durante um teste de campo no Deserto de Mojave, quando uma pequena equipe de engenheiros do Laboratório de Propulsão a Jato da NASA, no sul da Califórnia, colocou o rover modular em uma série de desafios para testar a versatilidade de seu projeto.
p "DuAxel teve um desempenho extremamente bom em campo, demonstrando com sucesso sua capacidade de abordar um terreno desafiador, âncora, e, em seguida, desencaixe seu rover Axel amarrado, "disse Issa Nesnas, um tecnólogo em robótica no JPL. "Axel então manobrou autonomamente por encostas íngremes e rochosas, implantando seus instrumentos sem a necessidade de um braço robótico. "
Um rover flexível que tem a capacidade de viajar longas distâncias e fazer rapel em áreas de interesse científico de difícil acesso foi submetido a um teste de campo no deserto de Mojave, na Califórnia, para mostrar sua versatilidade. Composto por dois robôs Axel, DuAxel é projetado para explorar as paredes da cratera, poços, escarpas, aberturas e outros terrenos extremos na lua, Marte e além. Crédito:JPL / NASA p A ideia por trás da criação de dois rovers de eixo único que podem se combinar em um com uma carga útil central é maximizar a versatilidade:a configuração de quatro rodas se presta a dirigir grandes distâncias em paisagens acidentadas; a versão de duas rodas oferece uma agilidade que rovers maiores não podem.
p "DuAxel abre acesso a terrenos mais extremos em corpos planetários, como a Lua, Marte, Mercúrio, e possivelmente alguns mundos gelados, como a lua de Júpiter, Europa, "acrescentou Nesnas.
p A flexibilidade foi construída com paredes de cratera, poços, escarpas, aberturas, e outros terrenos extremos nesses mundos diversos em mente. Isso porque na Terra, alguns dos melhores locais para estudar geologia podem ser encontrados em afloramentos rochosos e nas faces de penhascos, onde muitas camadas do passado estão nitidamente expostas. Eles são difíceis de alcançar aqui, muito menos em outros corpos celestes.
p A mobilidade do rover e a capacidade de acessar locais extremos é uma combinação atraente para Laura Kerber, um geólogo planetário no JPL. "É por isso que acho o rover Axel muito agradável, "ela disse." Em vez de sempre tentar se proteger contra perigos como cair ou capotar, é projetado para resistir a eles. "
 p Durante o mesmo teste de campo, o rover DuAxel se separa em dois robôs de eixo único para que se possa descer uma ladeira muito íngreme para os rovers convencionais. Crédito:NASA / JPL-Caltech / J.D. Gammell
p Durante o mesmo teste de campo, o rover DuAxel se separa em dois robôs de eixo único para que se possa descer uma ladeira muito íngreme para os rovers convencionais. Crédito:NASA / JPL-Caltech / J.D. Gammell
p
Uma história de duas rodas
p O conceito radical de dois veículos robóticos funcionando como um só tem raízes no final da década de 1990, quando a NASA começou a explorar ideias para módulos, reconfigurável, veículos espaciais auto-reparáveis. Isso inspirou Nesnas e sua equipe no JPL a desenvolver o robusto, robô flexível de duas rodas que viria a ser conhecido como Axel.
p Eles imaginaram um sistema modular:dois Axels poderiam ser acoplados a qualquer lado de uma carga útil, por exemplo, ou três Axels poderiam acoplar a duas cargas úteis, e assim por diante, criando um "trem" de Axels capaz de transportar muitas cargas úteis. Este conceito também cumpriu o requisito de "autorreparação" do desafio da NASA:caso um Axel falhe, outro poderia tomar seu lugar.
p O desenvolvimento do Axel permaneceu focado no transporte modular até 2006, quando as imagens de satélite da superfície marciana revelaram ravinas nas paredes da cratera. Mais tarde, a descoberta do que parecia ser fluxos sazonais de água líquida - características escuras conhecidas como linhas de encostas recorrentes - aumentou o interesse no uso de robôs para coletar amostras. Os cientistas queriam saber se ravinas e linhas de declive recorrentes eram causadas por fluxos de água ou outra coisa.
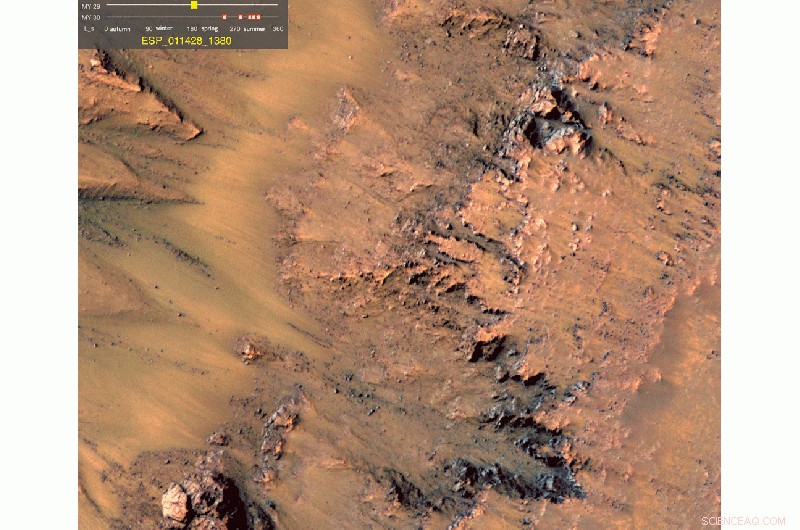 p Durante as estações quentes em Marte, faixas escuras chamadas "linhas de declive recorrentes" costumam aparecer nas encostas das crateras, como visto nesta série de observações capturadas pela câmera HiRISE a bordo do Mars Reconnaissance Orbiter da NASA. O rover DuAxel foi projetado para fazer rapel em áreas inacessíveis para estudá-las. Crédito:NASA / JPL-Caltech / Universidade do Arizona
p Durante as estações quentes em Marte, faixas escuras chamadas "linhas de declive recorrentes" costumam aparecer nas encostas das crateras, como visto nesta série de observações capturadas pela câmera HiRISE a bordo do Mars Reconnaissance Orbiter da NASA. O rover DuAxel foi projetado para fazer rapel em áreas inacessíveis para estudá-las. Crédito:NASA / JPL-Caltech / Universidade do Arizona
p Mas as encostas são muito íngremes para um rover convencional - mesmo para o Curiosity ou o rover Perseverance que logo pousará, ambos projetados para atravessar inclinações de até 30 graus. Explorar esses recursos diretamente exigiria um tipo diferente de veículo.
p Então, Nesnas e sua equipe começaram a desenvolver uma versão do Axel que seria amarrada a um módulo de pouso, usando a corda não apenas para descer o lado de uma cratera ou parede de cânion íngreme, mas também para fornecer energia e se comunicar com o módulo de pouso. Suas rodas podem ser equipadas com garras extra-altas, ou passos, para maior tração, enquanto os cubos das rodas podem abrigar microscópios, treinos, colheres de coleta de amostra, e outra instrumentação para estudar o terreno. Virar, o eixo de duas rodas giraria apenas uma de suas rodas mais rápido do que a outra.
p O interesse na flexibilidade do conceito levou a uma família crescente de designs de duas rodas, incluindo A-PUFFER e BRUIE da NASA JPL, que estendem a possibilidade de exploração a novos destinos e aplicações, incluindo debaixo de água em mundos gelados.
p Apesar da versatilidade do Axel amarrado, havia uma limitação notável quando usado em conjunto com um módulo de pouso estacionário:o módulo de pouso precisaria estar a uma distância de rapel do lado da cratera - exigindo um grau de precisão de pouso que pode não ser possível para uma missão planetária.
 p O Axel de duas rodas desce a encosta enquanto está amarrado a sua contraparte ancorada acima da encosta. A corda serve como uma espécie de corda de escalada, ao mesmo tempo que fornece energia e um meio de comunicação. Crédito:NASA / JPL-Caltech / J.D. Gammell
p O Axel de duas rodas desce a encosta enquanto está amarrado a sua contraparte ancorada acima da encosta. A corda serve como uma espécie de corda de escalada, ao mesmo tempo que fornece energia e um meio de comunicação. Crédito:NASA / JPL-Caltech / J.D. Gammell
p Para remover esse requisito e aumentar a mobilidade, a equipe voltou ao design modular original, adaptou-o ao novo Axel amarrado, e o nomeou DuAxel.
p "A principal vantagem de usar DuAxel fica clara quando você tem incerteza no local de pouso, como fazemos em Marte, ou você quer se mudar para um novo local para fazer rapel e explorar com Axel, "disse Patrick Mcgarey, um tecnólogo robótico no JPL e membro da equipe DuAxel. "Ele permite a condução sem amarras do local de pouso e permite a ancoragem temporária ao terreno porque é essencialmente um robô transformador feito para exploração planetária."
p Enquanto o DuAxel continua sendo uma demonstração de tecnologia e aguarda um destino atribuído, sua equipe continuará aprimorando sua tecnologia; dessa maneira, quando chegar a hora, o robô estaria pronto para rolar onde outros robôs temem pisar.