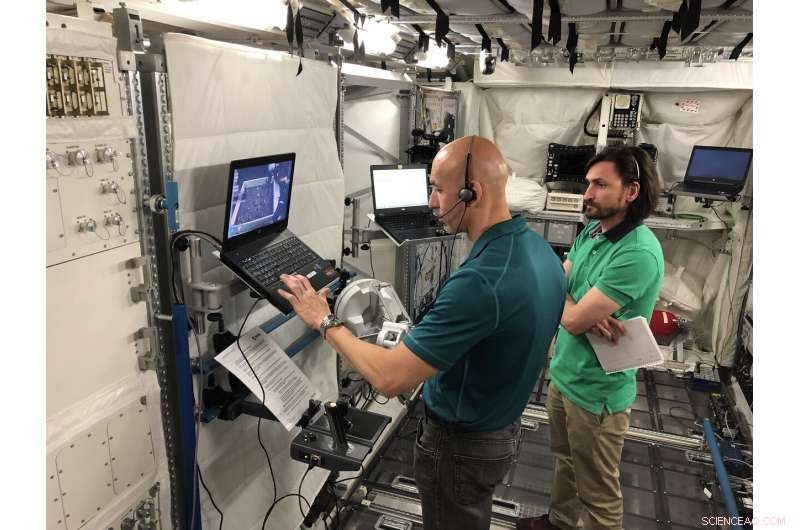
O astronauta da ESA Luca Parmitano prepara-se para as operações experimentais ANALOG-1 no terreno no Centro Europeu de Astronautas em Colónia, Alemanha. A investigação exigirá que ele controle remotamente um rover baseado na Terra a partir da estação espacial. Crédito:ESA
Os astronautas poderiam um dia controlar remotamente os robôs lunares e marcianos em órbita. Um próximo teste a bordo da Estação Espacial Internacional pode ajudar a tornar isso uma possibilidade. Em novembro, a ESA (Agência Espacial Européia) conduzirá um experimento em órbita conhecido como ANALOG-1 para ver se as tripulações da estação, cientistas no terreno e novas tecnologias podem trabalhar juntos para guiar um rover em uma missão lunar simulada.
Este projeto investiga a eficácia com que um astronauta na Estação Espacial Internacional pode operar um rover em um terreno semelhante à Lua na Terra. O rover é encarregado de coletar amostras de rochas e solo, em seguida, investigando remotamente as amostras.
"Este é um cenário científico potencial durante as futuras missões à Lua e Marte, "disse William Carey, Cientista da ESA e investigador principal da experiência ANALOG-1. "O espaço é um lugar muito difícil para humanos e máquinas. A exploração futura do sistema solar pode envolver o envio de exploradores robóticos para testar as águas em planetas desconhecidos antes de enviar humanos."
Fechar remotamente
ANALOG-1 é a etapa final no projeto METERON (Rede de Operações de Robótica de Ponta a Ponta Multiuso) em andamento, que é uma iniciativa para desenvolver e testar robótica, inovações em comunicações e operações que os astronautas poderiam usar para explorar o sistema solar.
Historicamente, Rovers que exploram outros planetas têm sido controlados com software pré-programado e por cientistas enviando comandos da Terra que levam longos períodos de tempo para chegar aos robôs. Essas abordagens funcionaram bem o suficiente para avançar muito em nosso conhecimento de outros mundos, mas podem dificultar o trabalho rápido, mude os planos ou adapte-se rapidamente a situações inesperadas.
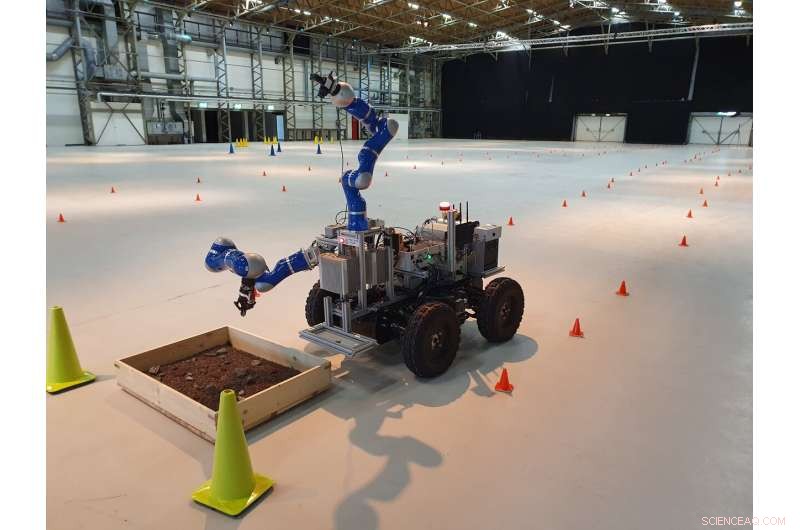
O rover ANALOG-1 Interact localizado próximo ao Centro Europeu de Pesquisa e Tecnologia Espacial na Holanda é controlado por um astronauta substituto baseado no Centro Europeu de Astronautas na Alemanha. Os cones marcam uma rota que o rover deve seguir para chegar ao local da amostra. Crédito:ESA
Carey e sua equipe da ESA suspeitam que um método melhor pode ser colocar astronautas em órbita em torno de locais de exploração onde eles possam se comunicar rapidamente com o rover. Com um astronauta próximo aos controles do rover, os cientistas poderiam explorar com mais eficiência um alvo planejado, aproveite uma oportunidade surpresa ou gerencie um problema rapidamente.
"Uma série de agências espaciais analisaram esse cenário para a exploração de corpos planetários - especialmente para Marte, "disse Carey." A abordagem pode aumentar muito o retorno científico dessas missões, além de oferecer uma maneira de evitar a contaminação potencial de humanos pousando na superfície antes que possamos responder a perguntas sobre a vida existente ou anterior em Marte. "
Os resultados do experimento podem ser de valor particular para a NASA, que se prepara para explorar a Lua a partir da planejada nave espacial Gateway como parte do programa Artemis, onde a NASA estará indo para a Lua e para Marte.
Ao alcance do braço
Durante o experimento de duas horas, O astronauta da ESA Luca Parmitano usará uma estação de trabalho a bordo do laboratório orbital para tentar comandar um rover controlável remotamente e seu braço enquanto atravessa uma superfície semelhante à da lua perto de Noordwijk, uma cidade na Holanda. Parmitano irá conduzir o robô usando um sistema de computador especializado e será guiado por cientistas que se comunicam com ele no solo. Ele também usará um "joystick" Sigma 7 de última geração que permitirá ao astronauta sentir o que o braço do veículo espacial encontra.
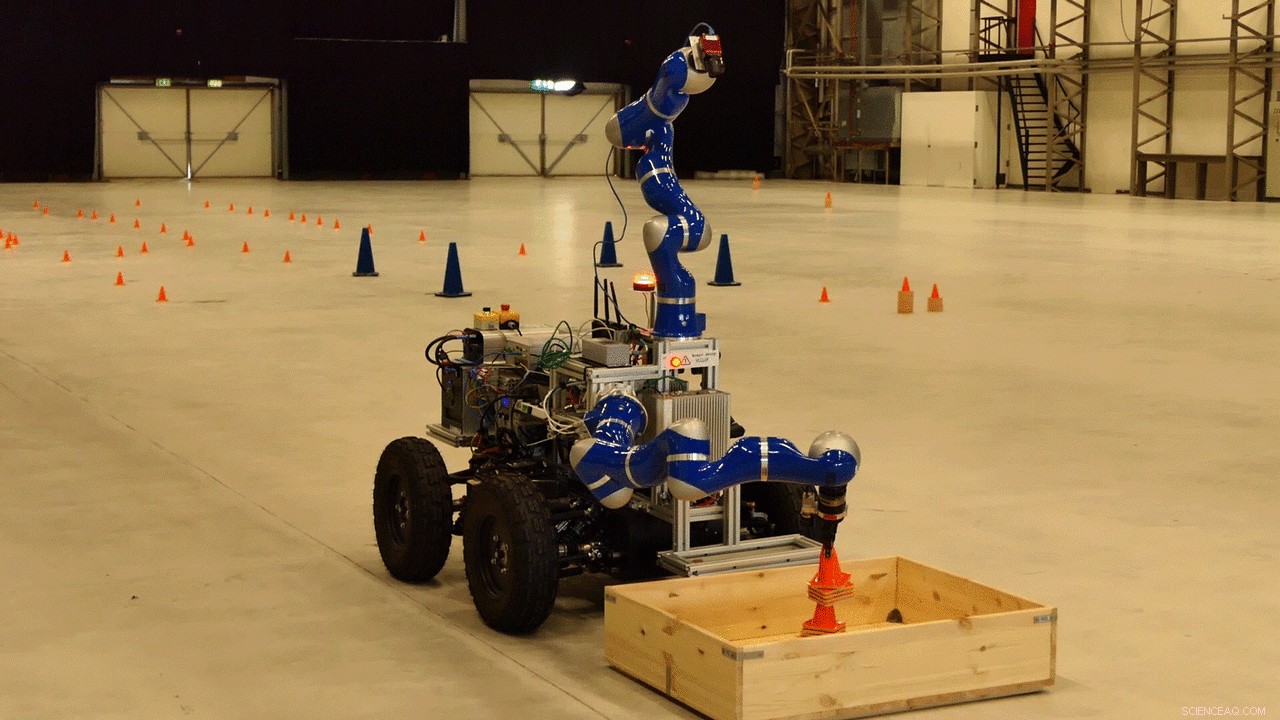
O rover que será usado como parte do experimento ESA ANALOG-1 move cones dentro da caixa de amostra que conterá rochas durante o experimento. Créditos:ESA
"O feedback de força permite que o operador sinta o que o robô sente, "disse o engenheiro chefe de robótica da ESA, Thomas Krueger." Por exemplo, se o robô toca um objeto frágil, ele mede e transmite informações de volta ao usuário, que então sente sua delicadeza no joystick Sigma 7. Eles podem operar o braço com mais cuidado do que com um joystick normal. "
Parmitano usará o joystick para direcionar o braço do robô para coletar amostras de rocha e solo de volta à Terra. Os cientistas acreditam que ele pode enfrentar dificuldades adicionais devido à forma como o corpo humano responde ao espaço. A pesquisa mostrou que a microgravidade pode prejudicar o sentido do tato ou tato de um astronauta, bem como a capacidade de rastrear objetos em movimento - ambos os quais são essenciais para a tarefa desta investigação.
Avaliando a tarefa em questão
Quando o experimento estiver concluído, pesquisadores no solo avaliarão o funcionamento dos sistemas de controle robótico e examinarão a capacidade de Parmitano de operar o rover sob os efeitos da microgravidade. Eles também observarão como Parmitano e a equipe de ciência na Terra foram capazes de se comunicar para tomar decisões e planos para controlar o rover.
"Os robôs têm a capacidade de estender nossa presença em outros mundos e aumentar nossa eficiência de exploração, "disse o gerente de projeto da ESA, Kjetil Wormnes." Os resultados do ANALOG-1 nos ajudarão a determinar a maneira mais eficaz de colaborar com robôs a fim de nos prepararmos para nossa exploração futura da Lua. "