Microrrobôs magnéticos usam forças capilares para persuadir as partículas a se posicionarem
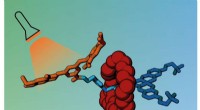
 p Mostrado em velocidade 4x, um microrrobô em forma de flor se aproxima de contas de plástico, usa forças capilares para grudá-los em uma de suas pétalas, em seguida, libera-os no local desejado girando no lugar. Crédito:Penn Engineering
p Mostrado em velocidade 4x, um microrrobô em forma de flor se aproxima de contas de plástico, usa forças capilares para grudá-los em uma de suas pétalas, em seguida, libera-os no local desejado girando no lugar. Crédito:Penn Engineering
p Em escalas microscópicas, escolhendo, colocação, coletando, e organizar objetos é um desafio persistente. Os avanços na nanotecnologia significam que há coisas cada vez mais complexas que gostaríamos de construir nesses tamanhos, mas faltam ferramentas para mover seus componentes. p Uma nova pesquisa da Escola de Engenharia e Ciências Aplicadas mostra como, robôs microscópicos, conduzido remotamente por campos magnéticos, pode usar forças capilares para manipular objetos que flutuam em uma interface óleo-água. Este sistema foi demonstrado em um estudo publicado na revista.
Cartas de Física Aplicada .
p O estudo foi liderado por Kathleen Stebe, Richer &Elizabeth Goodwin Professor no Departamento de Engenharia Química e Biomolecular da Penn Engineering, e Tianyi Yao, uma estudante de pós-graduação em seu laboratório. Nicholas Chisholm, um pesquisador de pós-doutorado no laboratório de Stebe, e Edward Steager, um cientista pesquisador do laboratório GRASP da Penn Engineering contribuiu com a pesquisa.
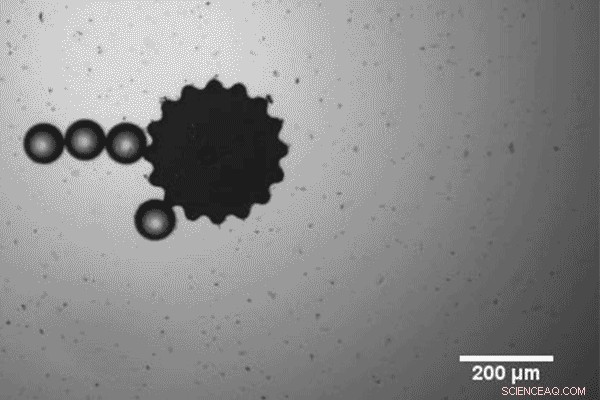
p Os microrrobôs do estudo da equipe da Penn são finas fatias de ímã, cerca de um terço de milímetro de diâmetro. Apesar de não ter partes móveis ou sensores próprios, os pesquisadores se referem a eles como robôs por causa de sua capacidade de escolher e posicionar objetos arbitrários que são ainda menores do que eles.
p Essa capacidade é função do ambiente especializado onde esses microrrobôs atuam:na interface entre dois líquidos. Neste estudo, a interface é entre água e hexadecano, um óleo comum. Uma vez lá, os robôs deformam a forma dessa interface, essencialmente cercando-se de um "campo de força" invisível de interações capilares.
p As mesmas forças capilares que puxam água das raízes de uma árvore para suas folhas são usadas aqui para colocar micropartículas de plástico em contato com o robô, ou outras partículas já grudadas em suas bordas.
Um micro-robô redondo deposita uma conta de plástico em uma "estação de encaixe". Crédito:Universidade da Pensilvânia p "Já usamos essas forças capilares para montar as coisas antes, mas agora os robôs e as partículas são muito mais leves e algumas ordens de magnitude menores em diâmetro, "Stebe diz." Quando você desce para a escala de mícron, significa que um tipo diferente de física governa as distorções. Coletar e organizar objetos com algumas dezenas de mícrons de diâmetro é uma grande conquista, e não algo que possamos fazer manualmente. "
p O estudo demonstrou a física que governa as interações entre esses micro-robôs e as partículas de plástico que eles foram encarregados de manipular.
p "No passado, "Stebe diz, "pegamos objetos estáticos e fizemos distorções em torno deles, em seguida, mostrou como as partículas eram atraídas para regiões de 'alta curvatura' dessas distorções. Agora, em vez de um objeto estático, temos um ímã que funciona como uma fonte de distorção móvel. "
p "Isso torna as coisas mais complicadas, "Chisholm diz." À medida que o robô se move em direção às partículas, cria um campo de fluxo que empurra as partículas para longe, então agora há repulsão hidrodinâmica e atração capilar interagindo. As partículas seguem o mínimo de energia, o que pode significar subir a colina. "
p Com um robô quadrado, os pesquisadores viram que, uma vez que conseguiram partículas sobre a crista da deformação, eles foram fortemente atraídos pelos cantos. Esta é uma propriedade potencialmente útil, já que os robôs podem se aproximar de seus alvos de uma ampla variedade de ângulos e orientações e ainda assim terminar com a partícula em um local previsível.
p "Mostramos que quando você muda a forma do robô, você muda o tipo e a força das interações, "Stebe diz." Cantos agudos seguram as partículas como uma morte sombria, mas quando suavizamos os cantos, podemos simplesmente girar os robôs para liberá-los. "
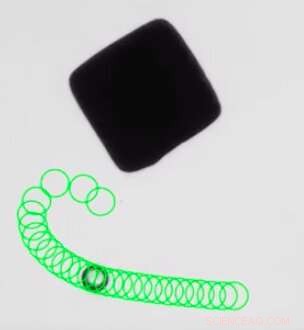 p As partículas são fortemente atraídas pelos cantos dos robôs quadrados. O contorno verde mostra a trajetória da partícula conforme o robô se aproxima. Crédito:Universidade da Pensilvânia
p As partículas são fortemente atraídas pelos cantos dos robôs quadrados. O contorno verde mostra a trajetória da partícula conforme o robô se aproxima. Crédito:Universidade da Pensilvânia
p Além de um quadrado com cantos macios, os pesquisadores também experimentaram com um robô redondo, bem como em forma de flor. Todos tinham a vantagem adicional de poder liberar com precisão sua carga girando no lugar, com as "pétalas" do robô em forma de flor fornecendo o controle mais preciso sobre a localização de uma partícula de carga.
p Finalmente, a equipe demonstrou uma docking station. Consistindo em um pedaço estático de plástico ondulado, a docking station está parte acima e parte abaixo da interface. Este arranjo fornece um conjunto muito previsível de distorções onde o material cruza a interface.
p "Podemos mover esses robôs e coletar coisas, "Steager diz, "construir materiais realmente complicados, pegando as peças uma de cada vez e encaixando-as onde quisermos."
p Como as interações entre os robôs e as partículas não têm nada a ver com os materiais de que são feitos, uma ampla gama de aplicações é possível.
p "As partículas que estamos manipulando neste estudo têm aproximadamente o tamanho médio de uma célula humana ou menor, "Yao diz, "então, este tipo de sistema pode ter aplicações no campo da biologia de célula única, com um micro-robô magnético movendo células individuais através de diferentes estágios de um experimento. "
p "Essas partículas também podem fazer parte de um sistema de sensor, "diz ele." Se você tivesse um robô e partículas sensoras em uma interface, você poderia coletar essas partículas e transportar toda a montagem em direção à área de mira com um grau extremamente preciso de controle espacial. Neste cenário, uma concentração muito baixa de partículas do sensor é necessária e elas podem ser facilmente retraídas após o teste. "
p O trabalho futuro envolverá o desenvolvimento de uma biblioteca maior de formas e comportamentos de micro-robôs para manipular objetos em seu ambiente, bem como sistemas de sensoriamento e controle mais robustos que permitiriam um maior grau de autonomia para os robôs.