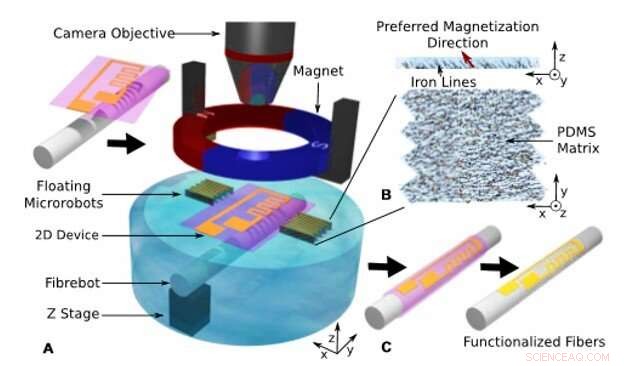
 p Configuração da transferência úmida de alta precisão assistida por microrrobô. (A) Microrrobôs controlados magneticamente por meio de um ímã externo para alinhar um dispositivo 2D flutuante em um substrato alvo (por exemplo, fibra óptica e microdispositivo 3D). (B) Vista da estrutura do microrrobô em que as linhas de ferro presas em uma matriz de elastômero são usadas para armazenar uma direção de magnetização preferida. (C) Dispositivos montados finais apresentando o padrão funcional alinhado com uma precisão de 5 µm e 0,4 °. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p Configuração da transferência úmida de alta precisão assistida por microrrobô. (A) Microrrobôs controlados magneticamente por meio de um ímã externo para alinhar um dispositivo 2D flutuante em um substrato alvo (por exemplo, fibra óptica e microdispositivo 3D). (B) Vista da estrutura do microrrobô em que as linhas de ferro presas em uma matriz de elastômero são usadas para armazenar uma direção de magnetização preferida. (C) Dispositivos montados finais apresentando o padrão funcional alinhado com uma precisão de 5 µm e 0,4 °. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p A cirurgia minimamente invasiva é cada vez mais usada para tratar pequenas lesões e existe uma demanda crescente por ferramentas médicas miniaturizadas. Isso inclui microcateteres, micro-pinças articuladas ou pinças para sentir e atuar durante cirurgias de precisão. A integração precisa e funcionalização de sensores químicos e físicos ainda permanecem um grande desafio. Em um novo estudo sobre
Ciência Robótica , Antoine Barbot e colegas do Instituto de Robótica Médica da China e do Centro Hamlyn de Cirurgia Robótica em Londres desenvolveram uma nova plataforma microrobótica para funcionalizar fibras que variam de 140 a 830 micrômetros (µm). Em seguida, eles alinharam os microbotões de 2 mm x 3 mm e 200 µm de espessura com circuitos eletrônicos flutuantes em uma fibra usando um processo de transferência úmida. p Os cientistas controlaram a posição e orientação dos microrrobôs na interface ar-água usando um ímã permanente. Usando o campo magnético não homogêneo do ímã, eles controlaram a distância precisa entre os dois microrrobôs e facilitaram as manobras de "agarrar e soltar" com padrões eletrônicos flutuantes. Barbot et al. propôs um modelo deste processo de controle, incluindo interações dos microrrobôs através da tensão superficial para validação detalhada do desempenho. Eles demonstraram uma variedade de exemplos de modalidades de sensor em uma fibra de 200 µm de diâmetro e dispositivos 3-D.
p A ênfase clínica na melhoria da vigilância médica e do diagnóstico direcionou o futuro da cirurgia para uma intervenção de precisão. A recente introdução de ferramentas robóticas em fibras para formar fibrebots permitiu aos pesquisadores combinar imagens, detecção e micromanipulação dentro de uma única fibra. Microgravadores sofisticados podem ser projetados diretamente na ponta de uma fibra usando polimerização de dois fótons. Os pesquisadores podem estabelecer microactuação usando ligações hidráulicas que alavancam a função microcapilar para usar o dispositivo para a entrega de drogas direcionadas e energia focada, como ablação a laser. As fibras ópticas são um substrato versátil para desenvolver microferramentas flexíveis. Suas superfícies fornecem um local ideal para incluir vários sensores ao longo de seu comprimento.
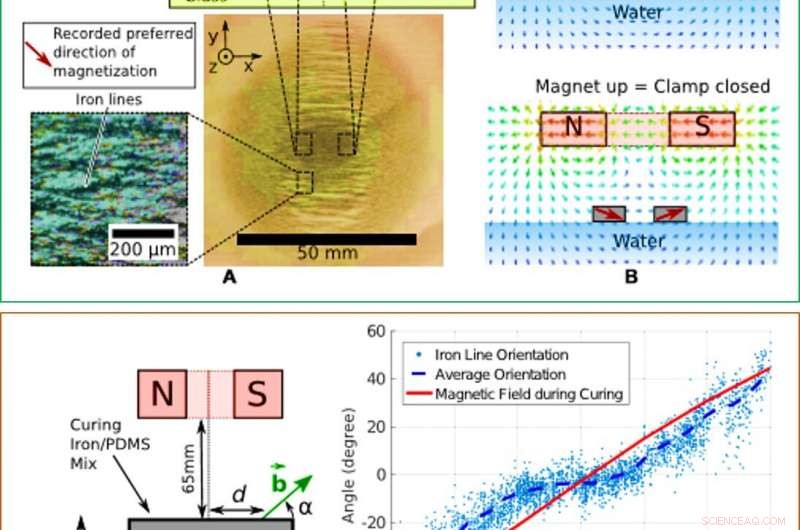 p ACIMA:Microrrobôs flutuantes com diferentes direções preferenciais de magnetização:Princípios de fabricação e controle. (A) Fabricação de microrrobôs. Diferentes direções de magnetização foram programadas no material com um ímã em anel. (B) Mecanismo de fixação usado neste estudo. Microrrobôs foram movidos juntos ou separados, dependendo da posição vertical do ímã, permitindo a fixação eficaz do padrão a ser transferido, seguido pelo controle de rotação e orientação. INFERIOR:Orientação da linha de ferro dentro da matriz PDMS. (A) Reconstrução Micro-CT da mistura de polímero / ferro. As linhas de ferro alinhadas com a direção do campo magnético durante a cura do polímero. (B) Direção da linha de ferro versus posição. A direção das linhas de ferro seguiu a direção do campo magnético de cura. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p ACIMA:Microrrobôs flutuantes com diferentes direções preferenciais de magnetização:Princípios de fabricação e controle. (A) Fabricação de microrrobôs. Diferentes direções de magnetização foram programadas no material com um ímã em anel. (B) Mecanismo de fixação usado neste estudo. Microrrobôs foram movidos juntos ou separados, dependendo da posição vertical do ímã, permitindo a fixação eficaz do padrão a ser transferido, seguido pelo controle de rotação e orientação. INFERIOR:Orientação da linha de ferro dentro da matriz PDMS. (A) Reconstrução Micro-CT da mistura de polímero / ferro. As linhas de ferro alinhadas com a direção do campo magnético durante a cura do polímero. (B) Direção da linha de ferro versus posição. A direção das linhas de ferro seguiu a direção do campo magnético de cura. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p Contudo, a padronização direta da microeletrônica em pequenos, objetos curvos usados para aplicações clínicas são desafiadores, uma vez que os processos de microfabricação existentes são ajustados principalmente para substratos planos. Os pesquisadores até agora usaram dois métodos principais de transferência; incluindo transferência a seco e a técnica de transferência úmida. A transferência a seco normalmente oferece melhor limpeza e maior precisão em comparação com a transferência úmida devido à ausência de corrosão úmida e perturbação do fluido. As técnicas de transferência úmida que podem ocorrer em intervenções cirúrgicas são limitadas por dificuldades de posicionamento preciso e escavação de dispositivos flutuantes. Isso se deve à falta de ferramentas de precisão ou plataformas robóticas para uma abordagem prática precisa. Os manipuladores de microrrobôs podem, portanto, resolver alguns dos principais problemas enfrentados pelos métodos manuais de transferência úmida.
p No presente trabalho, Barbot et al. propôs o uso de microrrobôs móveis na interface ar / água para controlar com precisão o movimento do padrão durante a transferência úmida. Para facilitar o controle simples e preciso, os cientistas propuseram desenvolver um par de microrrobôs para captar padrões flutuantes. Eles conseguiram isso usando um campo magnético gerado com um único ímã permanente acoplado para ajustar a direção de magnetização do material constituinte do robô. Barbot et al. usou a interação entre os microrrobôs e o campo magnético para posicionar o par de microrrobôs em dois locais diferentes da interface ar / água e formar uma garra.
 p Captura e manipulação de padrões baseados em microrrobôs. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p Captura e manipulação de padrões baseados em microrrobôs. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p Os pesquisadores controlaram a distância entre os dois microrrobôs, controlando a distância entre o dispositivo e o ímã. Eles construíram os dispositivos usando um elastômero e poldometilsiloxano (PDMS) misturado com pó de ferro. Para um determinado experimento, Barbot et al. magnetizou cada microrrobô para reagir de maneira semelhante a um determinado campo magnético. Os cientistas usaram uma camada de 200 µm de PDMS e mistura de ferro sob a influência de um campo magnético fraco para montar linhas de ferro na matriz PDMS. Eles curaram termicamente o PDMS para manter as estruturas da linha de ferro no lugar e avaliaram a orientação do produto usando microtomografia de raios-X.
p Os cientistas desenvolveram pares de microrrobôs com direções de magnetização personalizadas usando diferentes partes das camadas de ferro / PDMS para formar robôs retangulares medindo 2 mm por 3 mm e 200 µm de espessura. Eles adicionaram pequenas estruturas semelhantes a dentes aos microrrobôs para limitar o movimento do padrão durante os processos de preensão. A equipe observou as posições de diferentes pares de microrrobôs e suas respectivas respostas às diferentes posições verticais do ímã para obter dois padrões de movimento para os pares de microrrobôs, dependendo do ângulo (α) entre sua magnetização e o plano horizontal.
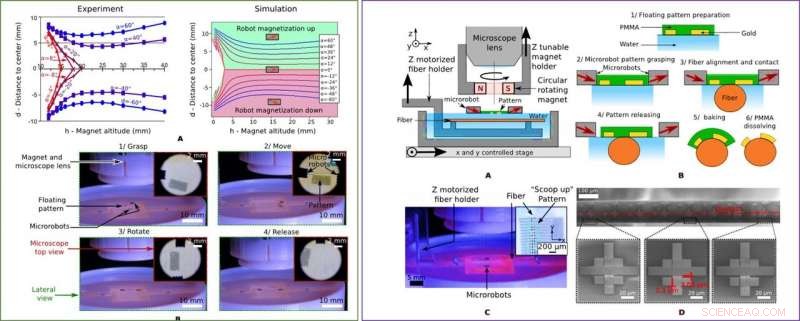 p ESQUERDA:Controle magnético do par de microrrobôs. (A) Diferentes posições de equilíbrio do par de microrrobôs influenciadas pela posição vertical do ímã. Esquerda:resultados experimentais. À direita:Resultados de simulação obtidos usando modelagem de elementos finitos do campo magnético. (B) Imagens ópticas mostrando o par de microrrobôs manipulando um padrão flutuante. À DIREITA:Padronização da fibra usando transferência úmida assistida por microrrobô. (A) Vista lateral da piscina de transferência com o par de microrrobôs segurando um padrão a ser transferido. (B) Fluxo de trabalho de fabricação para padronizar microdispositivos Au na fibra usando a proposta de transferência úmida assistida por microrrobô. (C) Padrão flutuante (estruturas de grade) transferido para uma fibra óptica de 200 µm de diâmetro, visto do microscópio. (D) Imagens de microscopia eletrônica de varredura (SEM) (Tescan SEM / FIB LYRA3 XM) de dois marcadores de posição de transferência sucessivos para avaliar a precisão de transferência alcançável do sistema proposto. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p ESQUERDA:Controle magnético do par de microrrobôs. (A) Diferentes posições de equilíbrio do par de microrrobôs influenciadas pela posição vertical do ímã. Esquerda:resultados experimentais. À direita:Resultados de simulação obtidos usando modelagem de elementos finitos do campo magnético. (B) Imagens ópticas mostrando o par de microrrobôs manipulando um padrão flutuante. À DIREITA:Padronização da fibra usando transferência úmida assistida por microrrobô. (A) Vista lateral da piscina de transferência com o par de microrrobôs segurando um padrão a ser transferido. (B) Fluxo de trabalho de fabricação para padronizar microdispositivos Au na fibra usando a proposta de transferência úmida assistida por microrrobô. (C) Padrão flutuante (estruturas de grade) transferido para uma fibra óptica de 200 µm de diâmetro, visto do microscópio. (D) Imagens de microscopia eletrônica de varredura (SEM) (Tescan SEM / FIB LYRA3 XM) de dois marcadores de posição de transferência sucessivos para avaliar a precisão de transferência alcançável do sistema proposto. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p Barbot et al. projetou os microrrobôs e permitiu que a altura do ímã controlasse a distância entre os dois robôs e regulasse a abertura e o fechamento das garras dos microrrobôs. Os cientistas compararam os resultados experimentais com uma simulação para entender a interação entre os microrrobôs. Eles observaram quatro graus de liberdade (DOFs) para controlar os pares de microrrobôs. Isso incluía agarrar (um DOF), posicionamento (dois DOFs) e orientações (um DOF) durante a transferência úmida. Os cientistas manipularam o padrão flutuante usando essas quatro entradas controláveis. Eles caracterizaram a propriedade de magnetização da mistura de ferro / PDMS como um guia geral para projetos de microrrobôs consistentes.
p Durante os experimentos, a equipe primeiro abaixou o ímã para separar os microrrobôs e posicioná-los em torno do padrão de destino. Eles então levantaram o ímã para fechar a lacuna entre os microrrobôs e agarrar o padrão para o alinhamento subsequente ao substrato de fibra alvo. A força de preensão dos microrrobôs não causou nenhuma deformação do padrão. Finalmente, eles baixaram o ímã novamente para que a garra liberasse o padrão e afastasse o par de robôs. Usando a configuração, os pesquisadores realizaram a transferência úmida do padrão flutuante para uma fibra óptica. Durante as seis etapas, processo de fabricação de microrrobôs, os cientistas transferiram padrões arbitrários de ouro (Au), como eletrodos ou extensômetros, para a fibra. Para entender a precisão da transferência de padrões, eles mediram a mudança entre dois padrões complementares depositados na fibra. Barbot et al. observaram desafios para adesão de padrão de longo prazo em locais de contato curvos da fibra.
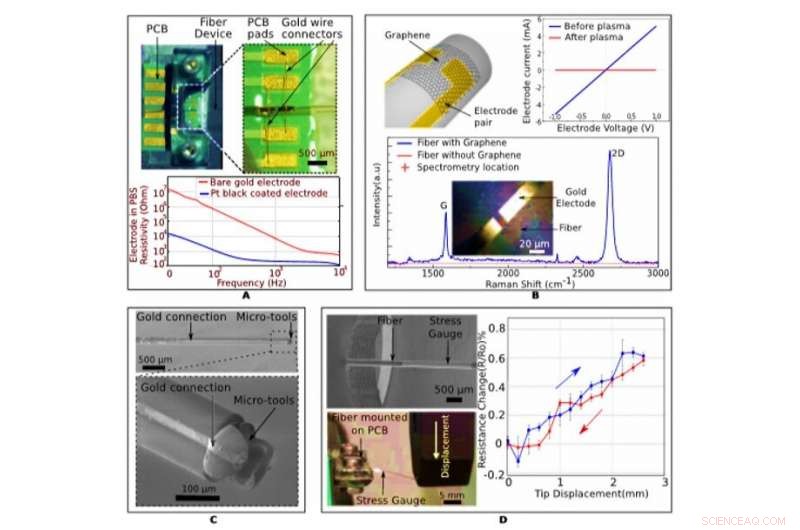 p Exemplos de aplicações de transferência úmida assistida por microrrobô para funcionalização de fibras. (A) Superior:Interface entre eletrodos com suporte de fibra e um PCB dedicado. Abaixo:Caracterização da impedância de um dispositivo de dois eletrodos com e sem eletrodeposição de preto Pt. (B) Dispositivos de grafeno 2D baseados em fibra. Transferências úmidas sequenciais foram feitas para padronizar sucessivamente a trilha de Au e, em seguida, o filme de grafeno. A presença de grafeno foi avaliada por espectrometria Raman e um teste destrutivo de plasma. (C) Imagem SEM de uma microferramenta 3D funcionalizada impressa na ponta de uma fibra. A trilha Au foi alinhada e transferida para a estrutura 3D com boa conformidade. (D) Medidor de tensão baseado em fibra projetado para medir a deformação da fibra com base em sua mudança de resistividade. Imagem SEM do dispositivo, imagem da experiência, e o sinal resultante. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p Exemplos de aplicações de transferência úmida assistida por microrrobô para funcionalização de fibras. (A) Superior:Interface entre eletrodos com suporte de fibra e um PCB dedicado. Abaixo:Caracterização da impedância de um dispositivo de dois eletrodos com e sem eletrodeposição de preto Pt. (B) Dispositivos de grafeno 2D baseados em fibra. Transferências úmidas sequenciais foram feitas para padronizar sucessivamente a trilha de Au e, em seguida, o filme de grafeno. A presença de grafeno foi avaliada por espectrometria Raman e um teste destrutivo de plasma. (C) Imagem SEM de uma microferramenta 3D funcionalizada impressa na ponta de uma fibra. A trilha Au foi alinhada e transferida para a estrutura 3D com boa conformidade. (D) Medidor de tensão baseado em fibra projetado para medir a deformação da fibra com base em sua mudança de resistividade. Imagem SEM do dispositivo, imagem da experiência, e o sinal resultante. Crédito:Science Robotics, doi:10.1126 / scirobotics.aax8336
p A equipe otimizou o método proposto de transferência úmida assistida por microrrobô para projetar uma variedade de dispositivos. Eles formaram dispositivos eletrônicos transferindo fibras com padrões para uma placa de circuito impresso e realizaram conexões elétricas usando fios de Au de 25 µm. Eles formaram esses sensores eletroquímicos para aplicações potenciais em microcateteres e outros dispositivos implantáveis. Os cientistas também demonstraram a técnica de fabricação usando várias camadas de diferentes materiais para formar um dispositivo de grafeno de dois terminais em uma fibra de vidro de 200 µm de diâmetro. Eles escolheram o grafeno devido às propriedades únicas do eletrodo do material. Eles usaram o método para integrar dispositivos eletromecânicos ativos em substratos 3-D, seguido por padronização em estruturas 3-D complexas. Por exemplo, eles transferiram um padrão Au em uma micrferramenta de ponta de fibra capilar de vidro de 170 µm (projetada usando litografia de dois fótons). O trabalho abrirá o caminho para a engenharia de dispositivos eletromecânicos complexos em microescala usando técnicas de microfabricação híbrida com amplas aplicações durante a detecção de biomarcadores clínicos e cirurgia de precisão.
p Desta maneira, Antoine Barbot e uma equipe de pesquisadores interdisciplinares apresentaram uma solução prática para transferência úmida de filmes finos e cristais 2-D com precisão de nível de micrômetro em substratos 3-D. Eles desenvolveram um microrrobô magnético flutuante capaz de armazenar uma direção de magnetização preferencial para manipulá-los sob um campo magnético permanente. A equipe de pesquisa ajustou o microgripper robótico ajustando a posição do ímã para agarrar, alinhe e libere padrões 2-D flutuantes.
p A configuração proposta é simples, reproduzível e confiável. A nova técnica de fabricação abrirá novas aplicações em cirurgia intervencionista com sensores eletroquímicos, microactuadores e dispositivos eletrônicos 2-D complexos. O foco futuro para Barbot et al. incluirá dispositivos hierárquicos de engenharia baseados em cristais 2-D de van der Waals de várias camadas para integrar componentes ativos em pontas de fibra e, finalmente, formar fibrebots acionados por capacidade de atuação e detecção em nano ou microescala. p © 2019 Science X Network