Eletrônica multifuncional à base de nanomembrana de semicondutor de óxido metálico para interfaces humanos-vestíveis
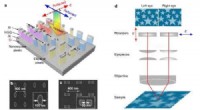
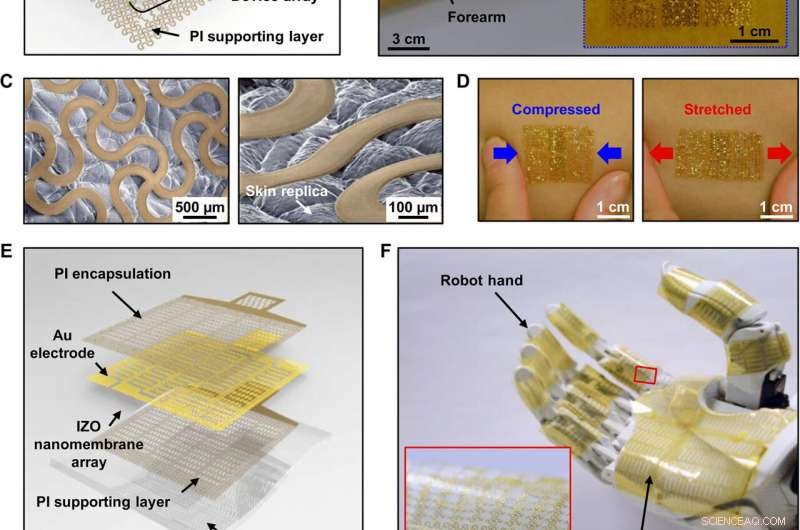 p Ultra fino, extensível, mecanicamente imperceptível, dispositivo HMI multifuncional para humanos e robótica. (A) Vista esquemática explodida de um dispositivo HMI multifuncional ultrafino. (B) Imagem ótica do dispositivo em um antebraço humano. A inserção é uma imagem ampliada. (C) Imagem SEM do dispositivo em um pedaço de pele replicado. (D) Imagens ópticas do dispositivo em pele humana sob deformação mecânica:comprimida (esquerda) e esticada (direita). (E) Vista esquemática explodida do conjunto de sensores de temperatura para a mão robótica. (F) Imagem ótica do conjunto de sensores de temperatura em uma mão robótica. A inserção é uma imagem ampliada. (G) Imagens SEM da matriz do sensor de temperatura. (H) Imagens ópticas do conjunto de sensores de temperatura na mão robótica sob deformação mecânica:dobrado (à esquerda) e esticado (à direita). Crédito da foto:Kyoseung Sim, University of Houston. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p Ultra fino, extensível, mecanicamente imperceptível, dispositivo HMI multifuncional para humanos e robótica. (A) Vista esquemática explodida de um dispositivo HMI multifuncional ultrafino. (B) Imagem ótica do dispositivo em um antebraço humano. A inserção é uma imagem ampliada. (C) Imagem SEM do dispositivo em um pedaço de pele replicado. (D) Imagens ópticas do dispositivo em pele humana sob deformação mecânica:comprimida (esquerda) e esticada (direita). (E) Vista esquemática explodida do conjunto de sensores de temperatura para a mão robótica. (F) Imagem ótica do conjunto de sensores de temperatura em uma mão robótica. A inserção é uma imagem ampliada. (G) Imagens SEM da matriz do sensor de temperatura. (H) Imagens ópticas do conjunto de sensores de temperatura na mão robótica sob deformação mecânica:dobrado (à esquerda) e esticado (à direita). Crédito da foto:Kyoseung Sim, University of Houston. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p As interfaces eletrônicas homem-máquina (IHMs) vestíveis são uma classe emergente de dispositivos para facilitar as interações entre humanos e máquinas. Avanços na eletrônica, materiais e projetos mecânicos têm oferecido caminhos para dispositivos IHM vestíveis comerciais. Contudo, os dispositivos existentes são desconfortáveis, pois restringem o movimento do corpo humano com tempos de resposta lentos e desafios para realizar várias funções. Em um relatório recente sobre
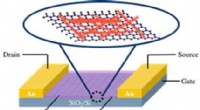
Avanços da Ciência, Kyoseung Sim e uma equipe de pesquisa interdisciplinar em ciência e engenharia de materiais, Engenharia Mecânica, Engenharia Biomédica, engenharia elétrica e de computação nos EUA e na China, detalhou o desenvolvimento de um novo polímero. p No trabalho, eles projetaram um dispositivo eletrônico ultrafino esticável à base de nanomembrana de óxido de zinco e índio processado por sol-gel-sobre-polímero. As vantagens incluem multifuncionalidade, processos de fabricação simples, desgaste imperceptível e interface robusta. Os dispositivos HMI vestíveis multifuncionais variam de memória de acesso aleatório resistiva (ReRAM) para armazenamento de dados a transistores de efeito de campo (FETs) que fazem interface com circuitos de comutação. Funcionalidades adicionais incluem sensores para detecção de movimento corporal e saúde, e micro-aquecedores para fornecer temperatura. Depois de testar os componentes individuais para suas propriedades exclusivas, Sim et al. projetou os dispositivos HMI como vestíveis perfeitos para humanos e também como pele protética para robôs para oferecer feedback inteligente e formar um sistema HMI (interface homem-máquina) de circuito fechado.
p As interfaces homem-máquina (IHMs) vestíveis funcionam como vias de comunicação direta entre humanos e máquinas. As interfaces podem detectar parâmetros físicos ou eletrofisiológicos dos usuários e facilitar que as máquinas executem as funções correspondentes. Desenvolvimentos recentes em eletrônica, materiais e projetos mecânicos têm dispositivos IHM avançados. Esses wearables são, Contudo, ainda semisoft e desconfortável para uma integração perfeita devido à incapacidade de deformar e se adaptar a uma variedade de movimentos humanos dinâmicos. Materiais eletrônicos macios que atendem perfeitamente aos requisitos de interesse oferecem uma alternativa para construir o elástico, dispositivos IHM vestíveis. Contudo, os materiais macios de borracha apresentam tempos de resposta lentos para sofrer histerese substancial após a deformação cíclica. Comparativamente, materiais inorgânicos podem apresentar tempos de resposta rápidos e sofrer histerese substancial para adoção como eletrônicos vestíveis e sensores.
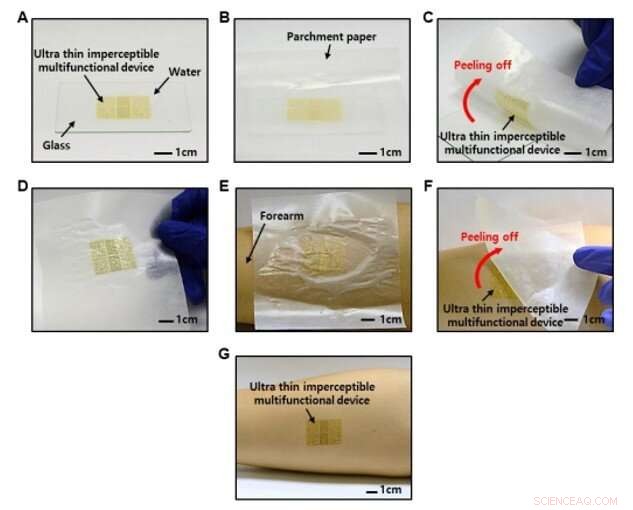 p Transferir o dispositivo HMI imperceptível ultrafino para o antebraço humano. (A) Um dispositivo fabricado em vidro com água aplicada. (B) Laminação de papel pergaminho sobre a parte eletrônica. (C) Recuperação do dispositivo HMI retirando o papel de pergaminho. (D) Uma imagem do dispositivo HMI em papel pergaminho. (E) Papel pergaminho de laminação com o dispositivo HMI no antebraço. (F) Retirando o papel pergaminho. (G) Uma imagem do dispositivo HMI transferido no antebraço. (Crédito da foto:Kyoseung Sim, Universidade de Houston). Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p Transferir o dispositivo HMI imperceptível ultrafino para o antebraço humano. (A) Um dispositivo fabricado em vidro com água aplicada. (B) Laminação de papel pergaminho sobre a parte eletrônica. (C) Recuperação do dispositivo HMI retirando o papel de pergaminho. (D) Uma imagem do dispositivo HMI em papel pergaminho. (E) Papel pergaminho de laminação com o dispositivo HMI no antebraço. (F) Retirando o papel pergaminho. (G) Uma imagem do dispositivo HMI transferido no antebraço. (Crédito da foto:Kyoseung Sim, Universidade de Houston). Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p Propriedades únicas do material podem facilitar o enrugamento, formas de serpentina e kirigami para servir como habilitadores-chave para dispositivos HMI com caráter flexível e flexível. Para alcançar várias funções, incluindo detecção, trocando, estimulação e armazenamento de dados, Contudo, os pesquisadores ainda devem desenvolver diversos tipos de materiais eletrônicos funcionais, ao lado de tecnologias de integração heterogêneas, como impressão de transferência. Esses dispositivos estão associados a procedimentos de fabricação complexos, incompatibilidade de engenharia, baixa escalabilidade e alto custo. Adicionalmente, para equipar interfaces humanas e de máquina, os cientistas de materiais requerem uma compreensão mais ampla dos parâmetros de interação, avaliação e comunicação. Dispositivos IHM vestíveis são, portanto, necessários em humanos e máquinas para formar caminhos de circuito fechado com eficácia. Como resultado, a pesquisa na área de materiais robóticos visa o desenvolvimento de dispositivos IHM vestíveis para preencher as lacunas existentes na tecnologia.
p No presente trabalho, Sim et al. desenvolveu um ultrafino, dispositivo HMI mecanicamente imperceptível e extensível para ser usado na pele humana e em um robô, para capturar dados físicos e oferecer feedback inteligente, respectivamente, para criar um sistema IHM de malha fechada. Eles desenvolveram os materiais sem combinar vários materiais funcionais, dispositivos ou etapas excessivamente heterogêneas de integração. O design do dispositivo no ultrafino, Meandros, a configuração de malha aberta com extensibilidade mecânica permitiu que o usuário desconhecesse totalmente o dispositivo, enquanto extraia sinais úteis do usuário. O dispositivo vestível coletou sinais do músculo humano para guiar o robô diretamente para permitir ao usuário sentir as sensações experimentadas pela mão do robô. A equipe de pesquisa estudou coletivamente os materiais e o design do dispositivo, fabricação e caracterização para demonstrar aspectos fundamentais da nanomembrana de óxido metálico para aplicações multifuncionais em dispositivos HMI.
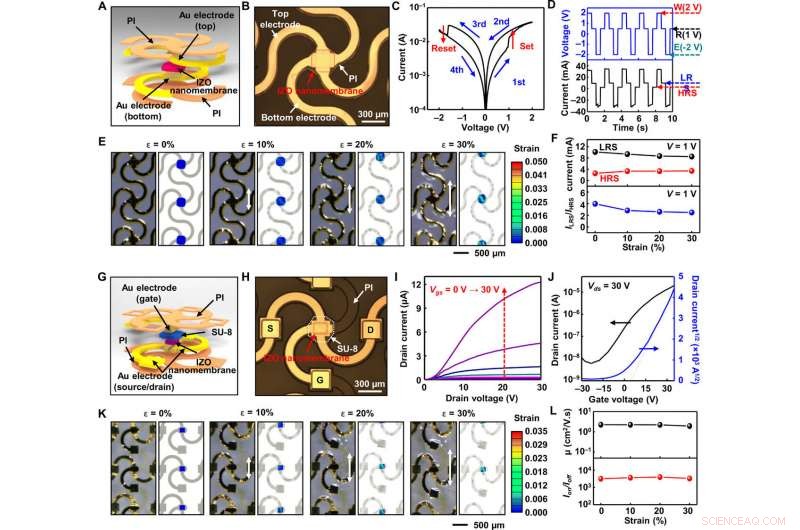 p Características do ReRAM e FETs. (A) Vista esquemática explodida do ReRAM baseado em nanomembrana IZO. (B) Imagem microscópica óptica do ReRAM. (C) Características I-V da comutação bipolar do ReRAM. (D) Ciclo WRER do ReRAM. (E) Imagens sequenciais do ReRAM baseado em nanomembrana IZO sob tensão e resultados FEA correspondentes de IZO. (F) Corrente em LRS e HRS e ILRS / IHRS sob tensão. (G) Vista esquemática explodida do IZO FET. (H) Imagem microscópica óptica do FET. (I) Características de saída do FET. (J) Características de transferência do FET. (K) Imagens sequenciais dos FETs sob tensão e resultados FEA correspondentes de IZO. (L) Mobilidade de efeito de campo calculada do IZO e ION / IOFF do FET sob tensão. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p Características do ReRAM e FETs. (A) Vista esquemática explodida do ReRAM baseado em nanomembrana IZO. (B) Imagem microscópica óptica do ReRAM. (C) Características I-V da comutação bipolar do ReRAM. (D) Ciclo WRER do ReRAM. (E) Imagens sequenciais do ReRAM baseado em nanomembrana IZO sob tensão e resultados FEA correspondentes de IZO. (F) Corrente em LRS e HRS e ILRS / IHRS sob tensão. (G) Vista esquemática explodida do IZO FET. (H) Imagem microscópica óptica do FET. (I) Características de saída do FET. (J) Características de transferência do FET. (K) Imagens sequenciais dos FETs sob tensão e resultados FEA correspondentes de IZO. (L) Mobilidade de efeito de campo calculada do IZO e ION / IOFF do FET sob tensão. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p Sim et al. compôs o dispositivo HMI com uma matriz ReRAM (memória de acesso aleatório) baseada em nanomembrana de Óxido de Zinco Índio (IZO), Matriz FET (transistor eficaz de campo), sensores de temperatura distribuídos, Sensores UV, sensores de deformação e simuladores térmicos baseados em ouro (Au). Eles projetaram todos os dispositivos em uma camada fina (~ 2 µm) de poliimida (PI) por revestimento giratório no topo de um substrato de suporte de vidro rígido para permitir a fácil liberação do dispositivo para ficar independente. Depois de muitas etapas intrincadas de engenharia, eles concluíram a fabricação do dispositivo imergindo-o em um agente corrosivo de óxido tampão (BOE) para liberar o dispositivo da plataforma de vidro. Usando papel manteiga, os cientistas então transferiram o dispositivo para um braço humano sem um adesivo adicional. Eles usaram microscopia eletrônica de varredura para mostrar que o polímero da pele não sofreu delaminação ao entrar em contato com a pele. Para formar um sistema IHM de circuito fechado entre humano e máquina, os cientistas desenvolveram de forma semelhante uma prótese de pele composta de poli (dimetilsiloxano) (PDMS) e uma série de sensores para imitar as funções sensoriais da pele humana e implementaram em uma mão de robô.
p Sim et al. realizaram caracterização detalhada do semicondutor de óxido de nanomembrana IZO processado por sol-gel-sobre-polímero, que foi a chave para realizar múltiplas funcionalidades sem integração heterogênea. Uma vez que dispositivos de armazenamento de dados, como memória, eram componentes integrais em IHMs vestíveis; os cientistas construíram o ReRAM extensível baseado em nanomembrana IZO com uma estrutura sanduíche de Au / IZO / Au com encapsulamento de PI (poliimida). Sob tensão suficiente, eles criaram íons de oxigênio e vacâncias de oxigênio para formar um filamento condutor entre os dois eletrodos para uma transição drástica de corrente do estado de alta resistência (HRS) para o estado de baixa resistência (LRS). Quando eles aplicaram uma polarização reversa em uma voltagem específica, as lacunas de oxigênio foram neutralizadas, fazendo com que o filamento condutor se rompesse e a corrente diminuísse drasticamente. Sim et al. realizou ciclos de gravação-leitura-apagamento-gravação (WRER) e testes de retenção para avaliar a confiabilidade do ReRAM baseado em nanomembrana IZO, onde os resultados mostraram operação estável sem degradação.
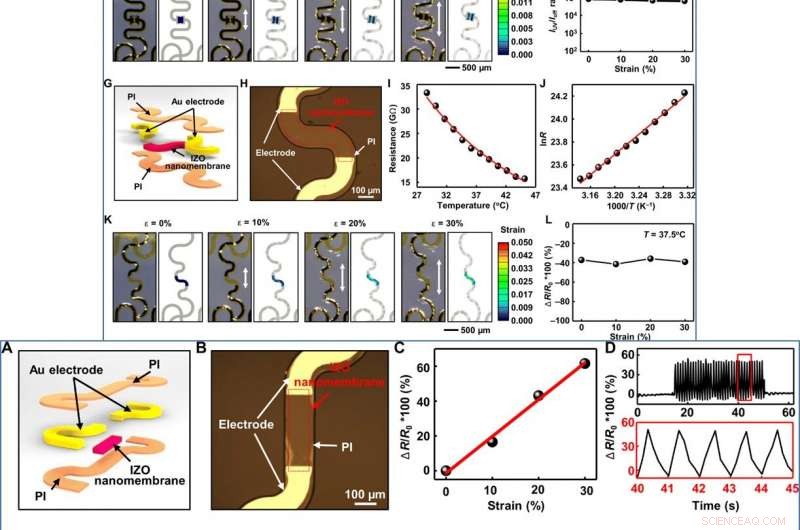 p ACIMA:Características dos sensores UV e de temperatura. (A) Vista esquemática explodida do sensor de UV baseado em nanomembrana IZO. (B) Imagem microscópica óptica do sensor UV. (C) Características I-V do sensor UV. (D) Curva de calibração do sensor IZO UV. (E) Imagens sequenciais do sensor de UV sob tensão e os resultados FEA correspondentes de IZO. (F) IUV / Idark para luz UV sob tensão. (G) Vista esquemática explodida do sensor de temperatura IZO. (H) Imagem microscópica óptica do sensor de temperatura. (I) Curva de calibração do sensor de temperatura. (J) Gráfico de lnR versus 1000 / T do sensor de temperatura. (K) Imagens sequenciais do sensor de temperatura IZO sob tensão e resultados FEA correspondentes de IZO. (L) Alteração da resistência relativa do sensor de temperatura sob tensão. INFERIOR:Características do sensor de deformação. (A) Vista esquemática explodida do sensor de deformação IZO. (B) Imagem microscópica óptica do sensor de tensão. (C) Curva de calibração do sensor de deformação. (D) Alteração da resistência relativa do sensor de deformação sob alongamento e relaxamento cíclicos. (E) Imagens sequenciais do sensor de deformação sob tensão e os resultados FEA correspondentes de IZO. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p ACIMA:Características dos sensores UV e de temperatura. (A) Vista esquemática explodida do sensor de UV baseado em nanomembrana IZO. (B) Imagem microscópica óptica do sensor UV. (C) Características I-V do sensor UV. (D) Curva de calibração do sensor IZO UV. (E) Imagens sequenciais do sensor de UV sob tensão e os resultados FEA correspondentes de IZO. (F) IUV / Idark para luz UV sob tensão. (G) Vista esquemática explodida do sensor de temperatura IZO. (H) Imagem microscópica óptica do sensor de temperatura. (I) Curva de calibração do sensor de temperatura. (J) Gráfico de lnR versus 1000 / T do sensor de temperatura. (K) Imagens sequenciais do sensor de temperatura IZO sob tensão e resultados FEA correspondentes de IZO. (L) Alteração da resistência relativa do sensor de temperatura sob tensão. INFERIOR:Características do sensor de deformação. (A) Vista esquemática explodida do sensor de deformação IZO. (B) Imagem microscópica óptica do sensor de tensão. (C) Curva de calibração do sensor de deformação. (D) Alteração da resistência relativa do sensor de deformação sob alongamento e relaxamento cíclicos. (E) Imagens sequenciais do sensor de deformação sob tensão e os resultados FEA correspondentes de IZO. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p Eles confirmaram o efeito da deformação mecânica no desempenho do dispositivo testando o ReRAM sob diferentes níveis de alongamento mecânico usando uma maca feita sob medida. Os resultados mostraram que o semicondutor experimentou deformação mínima e desprezível quando esticado, refletindo o design racional do dispositivo. Os resultados indicaram a capacidade do dispositivo ReRAM de funcionar de forma estável sob tensão mecânica sem degradação substancial. O FET usado no dispositivo formou de forma semelhante um bloco de construção fundamental para fazer a interface e alternar eletrônicos para IHMs.
p Os cientistas então testaram o sensor ultrafino de UV do polímero que pode ser usado na pele e sua capacidade de monitorar a exposição aos raios ultravioleta para aplicações que reduzem o risco de doenças de pele. De forma similar, eles testaram os efeitos da temperatura da pele, um importante indicador de saúde, medindo a resistência do termistor elástico ultrafino em diferentes temperaturas. Eles calcularam o coeficiente de temperatura para ser comparável aos termistores volumosos disponíveis comercialmente. A equipe de pesquisa também desenvolveu um sensor de deformação baseado em nanomembrana IZO para comunicação entre um humano e um robô para destacar a versatilidade do material IZO. Sim et al. comparou os resultados experimentais com a análise de elemento finito (FEA) para calcular o perfil de deformação da área de detecção IZO sob diferentes níveis de alongamento mecânico. As simulações concordaram bem com os resultados experimentais.
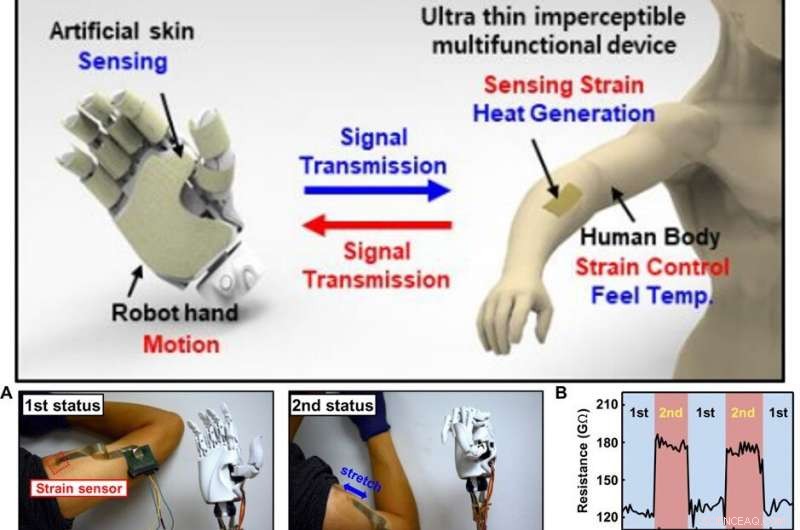 p ACIMA:Ilustração esquemática de uma IHM de malha fechada. INFERIOR:HMI de malha fechada vestível. (A) Imagem representativa do movimento humano para controlar a mão robótica. (B) Mudança de resistência do sensor de tensão na pele humana sob diferentes movimentos humanos. (C) Imagem representativa da imitação do movimento humano. (D) Mudança de resistência do sensor de tensão na imitação de movimento humano. (E) Imagem representativa da mão robótica, com o sensor de temperatura tocando a mão humana. (F) Mudança de resistência do sensor de temperatura na mão robótica enquanto a mão humana segura o robô. (G) Vista esquemática explodida do microaquecedor resistivo. (H) Mapeamento de temperatura IV do microaquecedor. (I) Mudança dinâmica de temperatura sob diferentes tensões aplicadas. (J) Curva de calibração do microaquecedor. Crédito da foto:Kyoseung Sim, University of Houston. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p ACIMA:Ilustração esquemática de uma IHM de malha fechada. INFERIOR:HMI de malha fechada vestível. (A) Imagem representativa do movimento humano para controlar a mão robótica. (B) Mudança de resistência do sensor de tensão na pele humana sob diferentes movimentos humanos. (C) Imagem representativa da imitação do movimento humano. (D) Mudança de resistência do sensor de tensão na imitação de movimento humano. (E) Imagem representativa da mão robótica, com o sensor de temperatura tocando a mão humana. (F) Mudança de resistência do sensor de temperatura na mão robótica enquanto a mão humana segura o robô. (G) Vista esquemática explodida do microaquecedor resistivo. (H) Mapeamento de temperatura IV do microaquecedor. (I) Mudança dinâmica de temperatura sob diferentes tensões aplicadas. (J) Curva de calibração do microaquecedor. Crédito da foto:Kyoseung Sim, University of Houston. Crédito:Science Advances, doi:10.1126 / sciadv.aav9653
p Depois de testar as funções individuais do dispositivo multifuncional, Sim et al. demonstraram a multifuncionalidade das IHMs interativas de circuito fechado. Quando sensores vestíveis na pele humana detectaram sinais como movimento humano induzido por tensão, os sinais detectados podem controlar o movimento da mão robótica. Por exemplo, quando a equipe de pesquisa colocou o sensor de deformação IZO no ombro humano, ele detectou a deformação pelo movimento do braço humano ou quando o usuário agarrou um objeto. Em paralelo, a pele protética baseada no sensor de temperatura IZO da mão robótica detectou a temperatura do ambiente externo ou do objeto agarrado para determinar a voltagem apta a ser aplicada a um estimulador térmico suave na pele humana para transmitir a sensação. Com base em uma série de tais interações cordenadas, os cientistas criaram um sistema IHM de circuito fechado interativo.
p Desta maneira, Kyoseung Sim e colegas projetaram uma nanomembrana de óxido de metal IZO processada por sol-gel-sobre-polímero e exibiram sua versatilidade em relação a dispositivos de memória macia ultrafinos, transistores, sensores de temperatura, sensores de tensão e sensores UV. Eles formaram o dispositivo multifuncional simultaneamente em um processo de etapa única, sem qualquer integração heterogênea. Os sensores vestíveis e elásticos ultrafinos combinados habilitados para eletrônicos, pele protética e dispositivo atuador para interfaces homem-robô comprovaram a viabilidade do sistema IHM de malha fechada. Essa configuração abrirá o caminho para um custo eficaz, fabricação escalável e dispositivos IHM vestíveis capazes de integração perfeita com o usuário. Os cientistas prevêem que o HMI vestível se tornará uma tecnologia vital com recursos aprimorados, conforto e conveniência para uma combinação eficaz entre máquinas e humanos. p © 2019 Science X Network