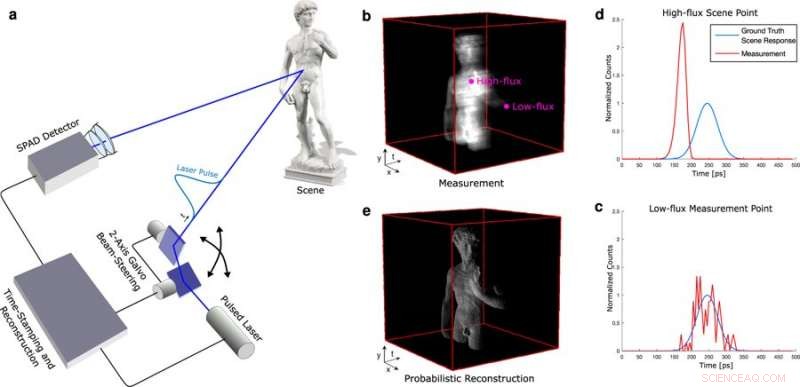
Estrutura de imagens 3D subpicosegundos. (a) Um colimado, o laser pulsado ilumina a cena em um único ponto. O laser é escaneado lateralmente usando um galvanômetro de espelho de 2 eixos. A cronometragem e o controle eletrônico registram a hora de cada chegada de fóton detectada em relação ao último pulso emitido e acumulam esses eventos em um histograma de contagens espaço-temporais de fótons (b). Este histograma é processado para estimar as informações de refletividade e profundidade (c). Dois pontos são destacados, uma correspondendo às medições de alto fluxo (d) e a outra às medições de baixo fluxo (e). Considerando que os últimos são barulhentos, as medições de alto fluxo sofrem de distorção de empilhamento, o que introduz uma tendência significativa para a estimativa de profundidade de algoritmos convencionais. O método de estimativa proposto modela com precisão ambos os cenários, permitindo que as informações de refletância e o tempo de viagem sejam estimados com precisão abaixo de picossegundos a partir de medições severamente distorcidas. Crédito: Relatórios Científicos , Doi:10.1038 / s41598-018-35212-x
Diodos de avalanche de fóton único (SPADs) são tecnologias de detector promissoras que podem ser usadas para obter sistemas de imagem 3D ativos com aquisição rápida, alta precisão de tempo e alta sensibilidade de detecção. Esses sistemas têm amplas aplicações nos domínios da imagem biológica, sensoriamento remoto e robótica. Contudo, os detectores enfrentam deficiências técnicas conhecidas como pileup que causam distorções de medição para limitar sua precisão. Em um estudo recente, conduzido no Departamento de Engenharia Elétrica da Universidade de Stanford, os cientistas Felix Heide e colegas de trabalho desenvolveram um modelo de formação de imagem probabilística que poderia modelar o engavetamento com precisão. Usando o modelo proposto, os cientistas desenvolveram métodos inversos para estimar com eficiência e robustez a profundidade da cena e a refletância a partir das contagens de fótons registradas. Com o algoritmo, eles foram capazes de demonstrar melhorias na precisão do tempo, em comparação com as técnicas existentes. Mais importante, o modelo permitiu precisão no sub-picossegundo em imagens 3D com eficiência de fótons pela primeira vez em cenários práticos, enquanto anteriormente apenas contagens de fótons amplamente variáveis foram observadas. Os resultados agora são publicados em Relatórios Científicos .
A geração de imagens ativas tem amplas aplicações em disciplinas que vão desde a condução autônoma até a geração de imagens microscópicas de amostras biológicas. Os principais requisitos para essas aplicações incluem alta precisão com tempo, taxas de aquisição rápidas, faixas de operação dinâmicas e alta sensibilidade de detecção para objetos de imagem ocultos da visão da câmera. Sensoriamento remoto e aplicações automatizadas exigem faixas de aquisição de <1 metro na escala de quilômetros.
A imagem fora da linha de visão depende da obtenção de informações codificadas por meio dos poucos fótons de retorno da luz indireta multiplamente espalhada, além da luz refletida diretamente. Para habilitar esses aplicativos, detectores ultrassensíveis foram desenvolvidos para registrar fótons individuais que retornam de uma fonte de iluminação pulsada. Diodos de avalanche de fóton único (SPADs) são uma das tecnologias de detector resolvido no tempo mais sensíveis que podem ser produzidos usando o processo de fabricação de semicondutor de óxido de metal complementar (CMOS). Os SPADs foram rapidamente estabelecidos como uma tecnologia de detecção de núcleo para imagens 3D.
Em seu princípio de função, SPADs são fotodiodos com polarização reversa que operam no modo Geiger, ou seja, acima de sua tensão de ruptura. Quando os fótons são incidentes na superfície ativa de um SPAD, uma avalanche de elétrons com data e hora pode ser acionada. A marcação de tempo repetida de fótons retornando de uma fonte de iluminação pulsada de forma síncrona que normalmente opera em taxas de MHz pode acumular um histograma de contagens de fótons no tempo. O histograma resultante documenta a intensidade aproximada do pulso de luz de retorno para recuperar e caracterizar a distância, refletância e geometria 3D de um objeto escondido da vista.
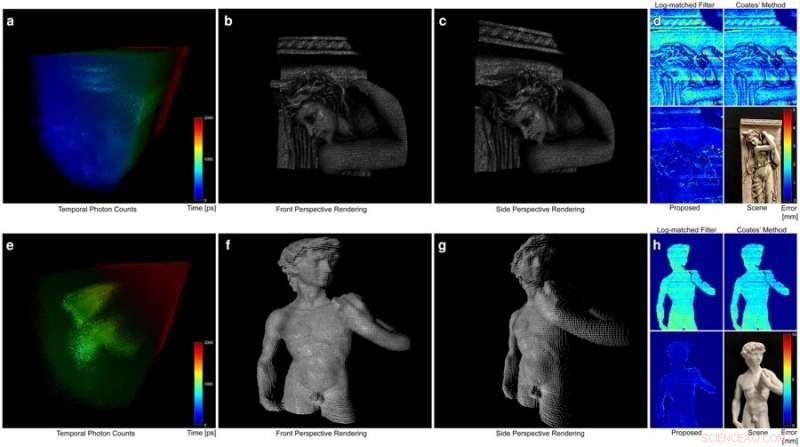
Reconstruções experimentais. Uma distribuição espaço-temporal registrada de contagens de fótons. (uma, e) é processado para estimar uma nuvem de pontos 3D (b, c, f, g) que contém informações de profundidade e albedo, aqui mostrado para duas cenas diferentes (fotografias mostradas em (d, h)). Os mapas de erros codificados por cores (d, h) comparar diretamente os resultados de várias técnicas de estimativa de profundidade, incluindo filtragem de correspondência de log, Método de Coates seguido por ajuste Gaussiano (na medição de alto fluxo), e o método proposto. Crédito: Relatórios Científicos , Doi:10.1038 / s41598-018-35212-x
Dependendo da aplicação esperada, Os SPADs podem operar no modo de execução livre (que permite que todos os eventos de fótons sejam detectados simultaneamente em todos os tempos de chegada) ou no modo gated (onde apenas fótons em uma janela de tempo específica entre os pulsos são detectados). Todas as aplicações estão sujeitas a um fenômeno fundamental conhecido como distorção de empilhamento que limita severamente a precisão. O Pileup pode limitar inerentemente o princípio de funcionamento do detector SPAD. Por exemplo, após cada avalanche de elétrons desencadeada, o detector requer extinção antes de detectar outros eventos de chegada de fótons. Durante este 'tempo morto' (dez a centenas de nanossegundos), o detector está inativo. Isso pode resultar em fótons anteriores de um único pulso de laser desencadeando uma avalanche, enquanto os pulsos posteriores são provavelmente ignorados no tempo morto; criando medições distorcidas imprecisas conhecidas como pileup. O fenômeno pode ser evitado operando sistemas de imagem ativos em um regime de baixo fluxo, como visto com as técnicas de última geração usadas para a imagem do primeiro fóton anteriormente.
Contudo, as condições variam para aplicações de imagem 3D em robótica, imagens biológicas ou sensoriamento automotivo, visto que operam em ambientes onde os objetos que refletem um número alto e baixo de fótons são essenciais para a tomada de decisões. A grande variação nas contagens de fótons adquiridos que resulta de diversas profundidades ou a refletividade variável de diferentes objetos é crucial para a imagem 3D. Nesse trabalho, Heide et al. introduziu um novo algoritmo de estimativa que superou as limitações existentes dos sistemas de imagem 3D ativos usando SPADs de execução livre.
O método proposto melhorou a precisão da estimativa existente de profundidade e albedo, em uma ampla gama de medições de baixo fluxo a alto fluxo. Os cientistas introduziram um modelo de formação de imagem probabilística que incluía empilhamento, com métodos inversos eficientes derivados para estimativas de profundidade e albedo. A estrutura de reconstrução estimou em conjunto todos os parâmetros desconhecidos para superar as limitações algorítmicas que anteriormente restringiam a precisão do tempo. O método proposto permitiu imagens 3D altamente precisas e rápidas para abrir novos regimes operacionais de imagens 3D com eficiência de fótons aplicáveis em condições com contagens de fótons dramaticamente variadas.
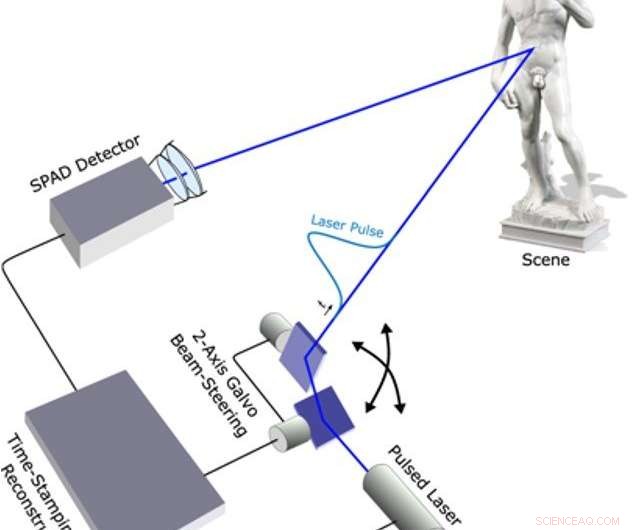
Hardware experimental para imagens 3D. A ilustração esquemática mostra a cena da "Estátua de Davi", fonte de iluminação e o procedimento de carimbo de data / hora para reconstrução de imagem. Crédito: Relatórios Científicos , Doi:10.1038 / s41598-018-35212-x
O desempenho do método proposto foi avaliado em duas cenas com perfis de refletância e profundidade altamente variáveis, que incluía a estátua de Davi e uma cena de baixo-relevo. Ambas as instâncias continham objetos com geometrias complexas e propriedades de refletância variáveis, incluindo comportamento especular para a "Estátua de Davi" e refletância lambertiana com albedo espacialmente variável na cena "Baixo-relevo". Para ambas as cenas, os cientistas capturaram uma medição de referência de verdade terrestre (informação fornecido por evidências empíricas) com um filtro de densidade neutra de 5%, que eliminou distorções de pileup ao amortecer a intensidade da fonte.
O hardware do sistema continha um sensor resolvido pelo tempo, laser pulsado, iluminação e óptica de coleta. A configuração também tinha um conjunto de espelhos de varredura para atingir um padrão de iluminação de varredura raster. O tempo de chegada de fótons foi capturado com um módulo de contagem de fóton único correlacionado no tempo PicoHarp 300. A fonte de iluminação era um laser de picossegundos de 450 nm ou 670 nm (gerando largura total na metade do máximo FWHM, larguras de pulso de 90 ps e 50 ps). A ótica de coleta consistia em uma lente objetiva de 75 m, Lente relé de 30 mm e uma objetiva de microscópio, projetado para estender o campo de visão do SPAD em toda a área digitalizada pela fonte de iluminação.
As medidas experimentais serviram de entrada para o método proposto e foram adquiridas sem nenhum filtro no caminho óptico. Reconstruções de profundidade e albedo juntamente com mapas de erros correspondentes foram obtidos durante o estudo. Os resultados verificaram que o método proposto alcançou reconstruções de alta qualidade não afetadas por acúmulo dependente da cena ou ruído de tiro (ruído eletrônico associado à natureza de partícula da luz). Os resultados foram comparados aos métodos convencionais, como a estimativa de filtro com correspondência de log e o método de correção de acúmulo de Coates, que não suprimiu o acúmulo de forma tão eficaz e sofreu com a precisão de profundidade dependente da cena. Em contraste, o método introduzido por Heide et al. alcançou precisão sub-picossegundo.
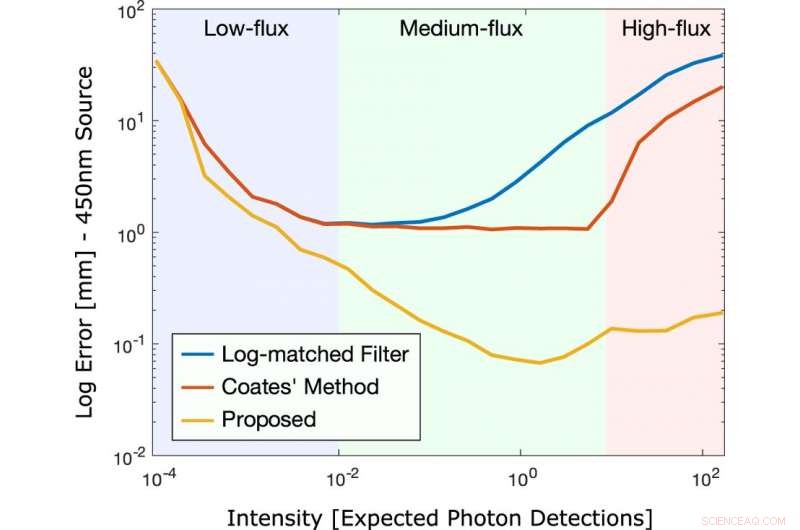
Regime de contagem de fótons ideal. Precisão de reconstrução de profundidade para contagens de fótons variáveis para o laser Alphalas LD-450-50 de 450 nm (FWHM de 90 ps). O filtro de correspondência logarítmica convencional, Método de Coates, e o método proposto são comparados. O número ideal de contagens de fótons está em torno da região não convencional de 1 fóton detectado por pulso em média, independente da resposta ao impulso e para uma ampla faixa de larguras de compartimentos de histograma. Crédito: Relatórios Científicos , Doi:10.1038 / s41598-018-35212-x
O código e os dados usados por Heide et al. para gerar os resultados do estudo estarão disponíveis no GitHub. No total, o modelo de formação de imagem probabilística proposto e os métodos inversos correspondentes alcançaram precisão sub-picossegundo para imagens 3D ativas, apesar das larguras de pulso do laser serem maiores que 50 ps. O novo método alcançou alta precisão em uma faixa dinâmica de medições de baixo fluxo a alto fluxo em comparação com as técnicas tradicionais. No futuro, o método proposto pode facilitar a aquisição de longo alcance pela multiplexação de múltiplas respostas afetadas por empilhamento. A inovação proposta abre caminho para sistemas de imagem 3D eficientes em fótons rápidos e precisos, onde contagens de fótons amplamente variáveis são observadas na prática. Os aplicativos podem abranger várias disciplinas para incluir mapeamento 3D e navegação, reconstrução e conservação de arte, direção autônoma, visão para robôs e máquinas, informação geográfica, imagem industrial e microscópica.
© 2018 Science X Network