Ao comparar as reações de natação do peixe-zebra (a presa) com o oscar do tigre vermelho (o predador, mostrado acima) contra as reações do peixe-zebra quando confrontado por um robô que parecia e nadava como a coisa real, pesquisadores da NYU Tandon concluíram que o acoplamento das técnicas de pesquisa da robótica com a teoria da informação avançará no entendimento das interações predador-presa. Crédito:New York University
Com a ajuda de peixes robóticos, pesquisadores da Escola de Engenharia Tandon da Universidade de Nova York estão demonstrando como a teoria da informação pode oferecer uma visão sobre as relações de causa e efeito entre predadores e presas no reino animal.
Em um artigo publicado no American Institute of Physics ' Chaos:An Interdisciplinary Journal of Nonlinear Science , a equipe de pesquisa liderada por Maurizio Porfiri, professor de engenharia mecânica e aeroespacial na NYU Tandon, validou o uso da teoria da informação para estudar as interações predador-presa. Através do uso de peixes robóticos, a pesquisa fornece uma base para experimentos controlados de causalidade em tais interações.
"Dentro de um contexto de duas entidades - o predador e a presa - buscando resultados totalmente diferentes, a robótica nos fornece uma ferramenta para validar o conceito de entropia de transferência para descobrir relações de causa e efeito e para responder a certas questões biológicas, "Porfiri disse." A questão que queremos entender é, se juntarmos um predador e sua presa, como eles estão influenciando uns aos outros? Como o comportamento do predador muda devido à presença da presa, e como a presença do predador muda a resposta da presa? "
A entropia de transferência examina a transferência de informações entre duas entidades e tornou-se amplamente aplicada em campos como neurociência e economia, mas só recentemente está surgindo como uma ferramenta para estudar o comportamento animal. A pesquisa detalhada no artigo explora como uma combinação de robótica e entropia de transferência pode oferecer novos insights sobre a análise das interações predador-presa e melhorar nossa compreensão do medo e da ansiedade.
O papel, "Teoria da informação e robótica se reúnem para estudar interações predador-presa, "foi escrito por Porfiri, Pesquisador visitante e autor principal Daniele Neri, NYU Tandon Dynamical Systems Laboratory Manager e Pesquisador Cientista Tommaso Ruberto, e a pesquisadora de graduação da Tandon Gabrielle Cord-Cruz.
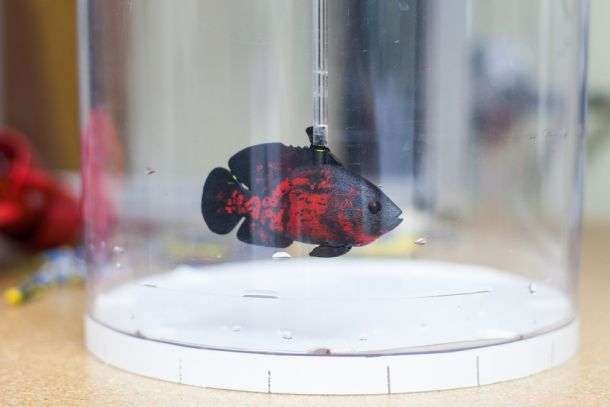
Os engenheiros da NYU Tandon criaram um robô biomimético que parecia e nadava como um verdadeiro tigre oscar vermelho. Crédito:New York University
Em experimentos anteriores, Porfiri e outros pesquisadores demonstraram a validade dos estímulos robóticos para experimentos com o comportamento animal, mostrando que o peixe-zebra exibiu uma resposta equivalente a réplicas vivas e robóticas de outros peixes-zebra e predadores.
Sua plataforma baseada em robótica permite manipular e controlar precisamente as interações melhor do que é possível quando se usa apenas animais vivos. No caso de seus últimos experimentos, a equipe expôs presas vivas - peixe-zebra - tanto a um tigre vermelho vivo oscar quanto a uma versão 3-D do peixe predador. O peixe-zebra nadou livremente em uma configuração semelhante a uma arena em torno do predador real e robótico, que em ambos os casos foi confinado ao meio do tanque. O robô viajou em uma trajetória dinâmica e personalizável que foi pré-programada para imitar os movimentos predatórios típicos do peixe vivo para incitar uma resposta dentro do peixe-zebra.
Os pesquisadores rastrearam as respostas do peixe-zebra tanto à réplica quanto ao predador vivo. Ao provocar uma resposta de medo controlada dentro do peixe-zebra a partir do estímulo robótico, a pesquisa demonstrou como a entropia de transferência pode isolar a relação de causa e efeito unidirecional entre uma réplica robótica e o peixe-zebra. Por outro lado, experimentando com predadores vivos, eles encontraram uma interação bidirecional entre o peixe-zebra e o predador, em que cada um estava influenciando o comportamento do outro.
Outros desenvolvimentos em sua plataforma robótica inovadora incluíram a engenharia do predador robótico para reagir aos movimentos do peixe-zebra em tempo real para experimentos futuros. Isso permitirá que os pesquisadores manipulem ainda mais a interação entre o predador robótico e o peixe-zebra de modo que o peixe-zebra cause o comportamento do predador.
Porfiri e sua equipe disseram que esperam que estudos futuros revelem mais sobre como os animais se comunicam entre si, bem como fornecer insights sobre os aspectos evolutivos do comportamento social e quais determinantes provocam medo e respostas relacionadas à ansiedade entre peixes-zebra e até mesmo outros animais, incluindo humanos.