As tecnologias pesquisadas no projeto SeaClear estão sendo testadas no porto de Hamburgo, entre outros. Crédito:HPA
Oitenta e seis milhões de toneladas de plásticos acabam nos oceanos todos os anos, com consequências devastadoras para a vida marinha, natureza e, em última análise, para nós, humanos. As vastas manchas flutuantes de plástico que cobrem a superfície da água, alguns tão grandes quanto países inteiros, são apenas a ponta do iceberg. Cerca de 90% desse lixo vai para o fundo do mar. O Centro Fraunhofer para Logística Marítima e Serviços CML e uma rede internacional de parceiros querem ser os primeiros a arrumar essa bagunça com um projeto chamado SeaClear. Segue uma entrevista com os gerentes de projeto Johannes Oeffner e Cosmin Delea.
Seu objetivo é coletar lixo no fundo do mar no projeto SeaClear. Porque?
Oeffner:A poluição marinha é um dos problemas globais mais importantes. Afeta o meio ambiente, a economia, segurança, saúde e cultura. Os plásticos não se degradam facilmente, portanto, é provável que permaneçam no mar por centenas de anos. Considerando que as previsões esperam que a produção de plástico quadruplique até 2050, teremos um grande problema se não agirmos. De acordo com o Fórum Econômico Mundial WEF, a proporção de plástico para peixes em 2014 era de um para cinco - em 2050, poderia haver tantos resíduos de plástico quanto peixes.
Muitas abordagens para retirar detritos de plástico da superfície dos mares foram propostas. Qual é o seu conceito?
Oeffner:Estamos nos concentrando em limpar o fundo do mar primeiro, especialmente nas áreas costeiras onde a poluição é particularmente forte. No conceito SeaClear, estamos utilizando vários veículos robóticos conectados uns aos outros. Uma nave-mãe autônoma ou controlada remotamente (veículo de superfície não tripulado, USV) é suportado por dois robôs subaquáticos (veículo operado remotamente, ROV) e um veículo aéreo ou drone (veículo aéreo não tripulado, UAV). Implementamos o drone e um robô para mapear o lixo na superfície e na coluna d'água. O segundo ROV faz uso dessas informações e usa uma pinça customizada e um dispositivo de sucção para coletar o lixo mapeado no fundo do mar e descartá-lo em uma lixeira coletiva.

Graças ao projeto SeaClear, a costa de Dubrovnik deve ser removida dos resíduos subaquáticos no futuro. Crédito:DUNEA
Que tecnologias estão por trás de tudo isso?
Delea:Usamos métodos de controle multiagente para robôs heterogêneos para dirigir de forma síncrona todos os veículos autônomos. Isso significa que a mudança de posição de um robô é reconhecida pelos outros robôs. Cada robô tem a capacidade interna de se adaptar a essas mudanças sem intervenção humana. Apesar de emitirmos um comando, é dirigido especificamente a um robô, enquanto os outros robôs notarão a mudança na pose e reagirão se necessário. Usamos algoritmos de aprendizagem profunda para detectar e distinguir resíduos da fauna e flora marinha. Especificamente, combinamos diferentes sistemas sensoriais, como câmeras convencionais e multiespectrais ou sensores acústicos para obter dados relevantes sobre as águas e, depois de várias sessões de treinamento, para detectar e classificar online os resíduos marinhos.
Como você treina os robôs autônomos?
Delea:A detecção e classificação requerem treinamento intensivo. Os primeiros passos para ambos são usar informações de fontes publicamente disponíveis, como grandes bancos de dados online que fornecem imagens da vida marinha. Em seguida, realizamos mais treinamento com alvos fictícios. Antes das demonstrações finais acontecerem, ensaios preliminares são realizados para avaliar seu desempenho.
As áreas costeiras são muito diferentes. Onde essas provações acontecem?
Oeffner:Atualmente, estamos testando as tecnologias em dois cenários diferentes em dois locais em profundidades de 20 a 30 metros. Queremos demonstrar o processo enquanto as operações portuárias estão em andamento com a infraestrutura existente e procedimentos fixos no porto de Hamburgo. Por isso esse cenário se concentra na área industrial do porto. O cenário costeiro em Dubrovnik, Croácia, dirige-se ao setor de turismo e visa especificamente a higienização de águas em pontos turísticos. Os primeiros testes ocorreram em ambos os locais na primavera. Mais testes estão programados para Dubrovnik no final do verão, depois que os testes foram suspensos por causa da corona.
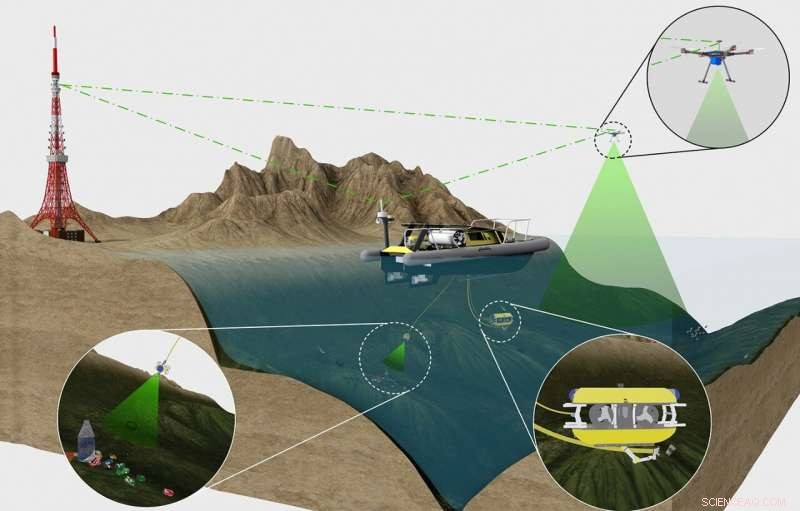
Vários veículos robóticos estão em rede uns com os outros no sistema SeaClear. Uma nave-mãe autônoma ou controlada remotamente (UPS) na superfície é apoiada por dois robôs subaquáticos (ROV) e um drone de vôo (UAV). Crédito:TUM
Quais são os maiores desafios deste projeto?
Delea:Os desafios nos dois locais de teste são diferentes:As águas em Hamburgo são muito difíceis de analisar por causa de sua turbidez e baixa visibilidade. Além disso, atualmente não existem estatísticas claras sobre o tipo e a quantidade de resíduos subaquáticos na área portuária. É aqui que queremos desenvolver ainda mais a robustez e os recursos individuais do sistema SeaClear e torná-lo pronto para o mercado. Para este fim, trouxemos interessados do porto de Hamburgo a bordo para ver o SeaClear como um futuro serviço portuário. A grande dificuldade em Dubrovnik é que o acesso do público não pode ser restringido. Por outro lado, isso significa que uma série de medidas de segurança adicionais serão necessárias, que terá de ser realizada quando o sistema for testado no local. Mas a visibilidade nessas águas está perto do ideal, portanto, o objetivo principal é validar o sistema geral e mostrar seu conjunto completo de recursos.
Como você está lidando com esses problemas?
Delea:Em Hamburgo, estamos tentando fundir dados de diferentes sensores ao mapear o lixo marinho, a fim de avaliar que tipo de lixo submarino pode ser encontrado nessas águas. Estamos usando principalmente sensores acústicos devido à visibilidade limitada. Em Dubrovnik, vamos instalar mecanismos de segurança adicionais no drone voador, com alguma ajuda dos sensores na nave-mãe. O objetivo aqui é minimizar os problemas de segurança e evitar colisões.
E como você vai garantir que ecossistemas frágeis, como recifes de coral, não sejam danificados?
Delea:Este problema não está presente em Hamburgo, enquanto o local de teste na Croácia também tem poucos recifes de coral. Mas quando o sistema SeaClear final for implantado, ele usará sensores ópticos e IA para distinguir os recifes de coral, evite procedimentos difíceis / perigosos para coletar apenas o lixo.
Qual parte do projeto é de responsabilidade do Fraunhofer CML e quem são os outros parceiros neste empreendimento?
Oeffner:CML é o coordenador técnico do projeto e é responsável por integrar todo o sistema, bem como projetar e desenvolver a cesta subaquática para conter os resíduos coletados. O que mais, estamos desenvolvendo uma central de monitoramento virtual que envia comandos aos robôs e divulga seus dados. O projeto também inclui a configuração da rede de comunicação e da infraestrutura de servidor necessária para fornecer os serviços SeaClear aos vários clientes por meio de interfaces da web. O consórcio é composto pelas Universidades Técnicas de Munique, Delft, Dubrovnik e Cluj-Napoca, bem como SubSea Tech Marseille, a Autoridade Portuária de Hamburgo e a Agência de Desenvolvimento Regional da DUNEA em Dubrovnik. O objetivo é que as duas últimas organizações também operem e usem o sistema desenvolvido após a conclusão do projeto.