Como os cientistas projetaram os controladores para robôs manipuladores na estação espacial chinesa
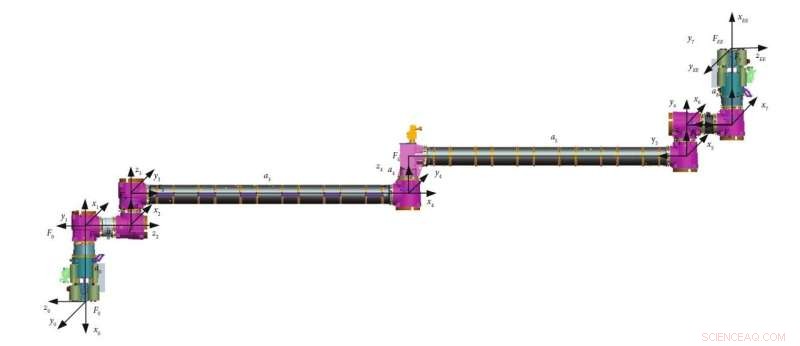
Na pesquisa, os resultados da simulação do nosso algoritmo de controle adaptativo composto recursivo são apresentados em comparação com o algoritmo de controle adaptativo direto. Os quadros de coordenadas do manipulador da Estação Espacial Chinesa são plotados aqui. Crédito:Espaço:Ciência e Tecnologia
No processo de construção e manutenção de rotina da Estação Espacial Chinesa, o manipulador desempenha um papel significativamente importante que pode realizar algumas tarefas importantes, como ancoragem de transposição, manutenção diária e atividades extraveiculares auxiliares. A alta precisão e o desempenho dinâmico do manipulador são necessários para a conclusão bem-sucedida dessas tarefas, que muitas vezes podem ser mantidas por controles projetados com base no modelo dinâmico.
No entanto, nas situações de prática, geralmente não é realista obter todos os parâmetros de inércia com precisão. Portanto, o controle adaptativo é desenvolvido para garantir a convergência do controle de rastreamento mesmo que o sistema tenha parâmetros incertos ou que mudem lentamente. Em um artigo de pesquisa publicado recentemente em
Space:Science &Technology , Dr. Li do State Key Laboratory of Management and Control for Complex Systems, propôs uma nova implementação recursiva de controle adaptativo composto para robôs manipuladores.
Primeiro, o Dr. Li revisitou o controlador adaptativo composto proposto por Slotine e Li. O controle adaptativo pode garantir a convergência do controle de rastreamento, mesmo que o sistema tenha parâmetros incertos ou que mudem lentamente. Em geral, esse esquema pode ser dividido em duas classes denominadas de adaptação direta e de adaptação indireta de acordo com o sinal que aciona a lei de atualização dos parâmetros.
Na primeira categoria, a atualização dos parâmetros é acionada pelos erros de rastreamento, enquanto na segunda categoria, os parâmetros são modificados de acordo com os erros de previsão, geralmente dos torques de junta filtrados. O controle adaptativo baseado em erros de rastreamento geralmente pode garantir uma convergência global de rastreamento; no entanto, a convergência dos parâmetros estimados tem condições mais rigorosas. Em comparação, o controle adaptativo indireto tem uma velocidade de convergência de parâmetros mais rápida, mas geralmente é difícil obter a estabilidade dos erros de rastreamento.
Combinando os dois métodos, o conhecido controlador adaptativo composto tem as vantagens de ambos, em que a adaptação dos parâmetros é acionada tanto por erros de rastreamento quanto por erros de previsão. No entanto, a complexidade computacional desses métodos de controle adaptativo é uma limitação principal na prática de robôs manipuladores, particularmente para o caso com alto grau de liberdade. Até o momento, poucos trabalhos deram atenção à execução recursiva do controlador adaptativo indireto ou do controlador adaptativo composto, provavelmente porque o uso do erro de previsão expresso pela matriz de regressão dificulta muito a redução da ordem da complexidade computacional.
Para resolver as dificuldades mencionadas, Dr. Li reescreveu a formulação de Newton-Euler usando a forma de matrizes gerais do clássico Algoritmo Recursivo de Newton-Euler. Em seguida, o método de controle adaptativo composto recursivo é projetado e a estabilidade do método proposto é verificada através da seleção de uma função de Lyapunov apropriada. A complexidade computacional da adaptação composta recursiva proposta é muito menor do que nos estudos existentes. A razão é que no controlador composto original, nenhuma consideração foi dedicada aos seus aspectos computacionais. Uma vez que a carga computacional dos controladores propostos está na mesma escala dos controladores adaptativos diretos recursivos, é realizada uma comparação entre esses dois métodos.
Os resultados mostram que os erros de rastreamento são obviamente diminuídos usando o controlador adaptativo composto recursivo, e as estimativas dos parâmetros convergem mais rapidamente com o controlador adaptativo composto recursivo. Na parte de simulação, o manipulador da Estação Espacial Chinesa é empregado como exemplo de simulação, e os resultados verificam a eficácia do algoritmo recursivo proposto. Além disso, como a carga computacional é linear com o número de juntas, o método proposto é atrativo especialmente para o manipulador multijunta redundante.