Crédito:Geist et al.
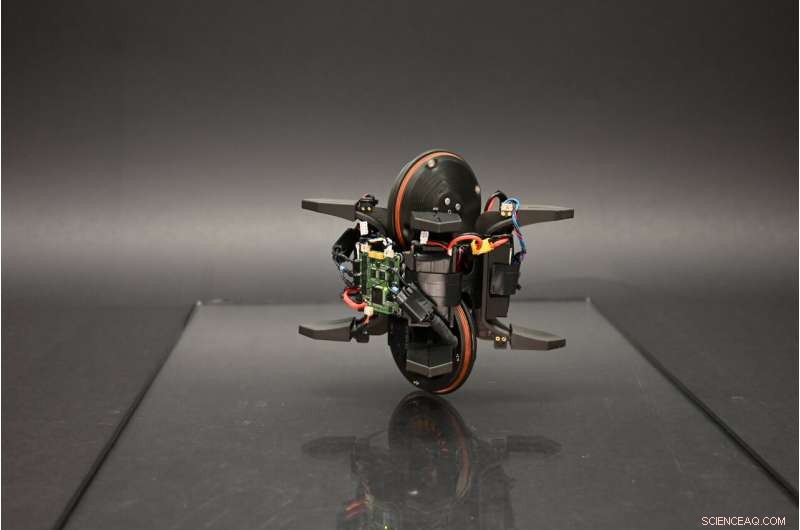
Pesquisadores da RWTH Aachen University da equipe do Prof. Sebastian Trimpe e do Instituto Max Planck para Sistemas Inteligentes (MPI-IS) Stuttgart desenvolveram recentemente o Wheelbot, um monociclo de roda de reação simétrica que pode saltar autonomamente sobre suas rodas a partir de qualquer posição inicial. Este robô exclusivo, apresentado em um artigo publicado nas
IEEE Robotics and Automation Letters foi fabricado usando uma combinação de componentes prontos para uso e impressos em 3D.
"Nosso grupo de pesquisa trabalha na interseção entre ciência de dados e engenharia. Uma direção específica de nossa pesquisa se concentra na combinação de insights da teoria de controle com aprendizado de máquina", disse René Geist, membro da equipe de Trimpe em Aachen e pesquisador principal por trás do Wheelbot, à Tech Xplore. "Testes como pêndulos, braços robóticos e quadricópteros nos ajudam a verificar se as suposições teóricas subjacentes a um algoritmo são práticas na realidade. Idealmente, esses bancos de teste são simples de usar e desafiadores de controlar com algoritmos de última geração , forçando-nos a pensar fora da caixa."
Dois outros exemplos de tais testbeds são o chamado "Balancing Cube" e seu descendente o "Cubli". Esses dois sistemas muitas vezes ajudaram a avaliar a eficácia dos sistemas de controle de rede e métodos orientados por dados para obter controle não linear.
O trabalho recente de Trimpe, Geist e seus colegas se baseia nesses esforços anteriores no campo. Seu objetivo era desenvolver um robô monociclo minimalista que pudesse ser usado como um banco de testes por roboticistas e cientistas da computação em todo o mundo. Para fazer isso, Trimpe e seu grupo de pesquisa na RWTH Aachen University uniram forças com Jonathan Fiene, chefe do laboratório ZWE Robotics no MPI-IS.
"No início do projeto, optamos por usar motores sem escova, pois a ZWE Robotics tem muita experiência em usá-los na iniciativa de robô dinâmico aberto, enquanto os preços dos motores leves sem escova caíram devido à ampla adaptação de quadcopters no consumidor mercado", explicou Geist. "Quando você olha para um motor, sem dúvida o atuador mais simples que se pode encontrar é conectar uma roda a ele. como uma 'roda de reação'."
Equilibrar um robô não voador de corpo único com a capacidade de dirigir e realizar manobras geralmente requer um mínimo de duas rodas. Estes podem ser rodas rolantes, resultando em um robô tipo Segway ou uma única roda rolante e uma roda de reação, resultando no que é conhecido como "roda de reação" - ou "troca de momento" - robô monociclo.
Robôs monociclo que integram rodas de reação têm designs muito simples e podem ser facilmente montados por especialistas em robótica e estudantes. Apesar de sua simplicidade, os monociclos de roda de reação são bastante difíceis de controlar. Isso os torna bancos de teste particularmente favoráveis para pesquisas em redes de robôs e métodos de controle baseados em aprendizado.
“Os robôs monociclos propostos anteriormente são projetados para se equilibrar apenas em torno de sua posição de equilíbrio vertical, o que limita consideravelmente o que você pode fazer com esses sistemas”, disse Geist. "Para maximizar a utilidade de um robô monociclo com roda de reação, decidimos que o Wheelbot deve ser capaz de se recuperar de grandes perturbações, ter uma fonte de alimentação a bordo para evitar que os cabos limitem sua manobrabilidade e, além disso, deve ser capaz de se erguer após derrubando."
Assim como as rodas dos monociclos, o Wheelbot possui uma roda rolante que evita que ele tombe enquanto se move longitudinalmente. Ao contrário dos monociclos, no entanto, o robô também integra uma roda de reação que evita que ele tombe na direção lateral.
"Para entender o funcionamento interno de uma roda de reação, você pode fazer um experimento simples em casa", disse Geist. "Tudo que você precisa é de uma cadeira giratória e um objeto moderadamente pesado, como um gato. Sente-se com os joelhos na cadeira e estique os braços enquanto segura o gato, depois gire a parte superior do corpo no sentido horário. Enquanto o gato sucumbe ao seu destino, você notará que seus joelhos giram no sentido anti-horário. Nesta analogia, a parte superior do corpo denota o rotor do motor, enquanto a parte inferior do corpo denota o estator do motor.
Essencialmente, nas rodas de reação, quando o rotor de um motor (conectado à roda) gira no sentido horário, o estator do motor (conectado ao resto do Wheelbot) gira no sentido anti-horário. Robôs que se equilibram usando uma roda de reação diferem dos robôs que recorrem a giroscópios para se equilibrar. Em um giroscópio, uma roda de giro rápido é girada ortogonalmente em relação à sua direção de rotação, criando torques de equilíbrio devido à conservação do momento angular.
Em uma roda de reação esses efeitos também ocorrem, mas são minúsculos comparados aos torques de reação. Os torques de reação são criados diretamente dentro da roda e apontam paralelamente à direção de rotação da roda.
Crédito:Geist et al.
“Durante a automontagem, os torques de reação devem girar o Wheelbot em 90 graus”, explicou Geist. "Durante a manobra, o motor do Wheelbot consome 16 amperes a 24 volts. Para um robô grande de 22 cm (8,7 polegadas), os motores são realmente poderosos, forçando-nos a usar um controlador de motor projetado sob medida, pois os controladores de motor disponíveis comercialmente eram ou muito grande ou não poderia lidar com corrente suficiente na tensão dada."
Com um consumo de corrente de 16 Amperes, os pesquisadores descobriram que o motor que move o Wheelbot atingiu seu limite de taxa em apenas 0,25 segundos. Devido a essa limitação e outros desafios normalmente encontrados ao construir monociclos baseados em rodas de reação, Geist e seus colegas decidiram criar um design totalmente novo para seu robô.
“Primeiro, decidimos que o robô deveria ser simétrico, reduzindo efetivamente o número de peças diferentes que se precisa imprimir e permitindo que o Wheelbot use qualquer uma de suas rodas como roda rolante”, disse Geist. "A simetria tem a vantagem adicional de que a roda superior deve ser consideravelmente menor em comparação com os robôs monociclos existentes, o que reduz sua inércia rotacional na direção da guinada. Em segundo lugar, projetamos as dimensões do robô para minimizar o torque necessário para a automontagem."
Em testes iniciais, os pesquisadores descobriram que a versão padrão de seu robô poderia saltar para as rodas de qualquer posição inicial em duas etapas. Isso permite que o robô desacelere sua roda de reação antes de completar a segunda e última etapa (ou seja, empurrando-se de volta). '
Além de criar um protótipo de seu robô, Geist e seus colegas também criaram um estimador de estado personalizado, um algoritmo que pode estimar os ângulos de rotação e inclinação do robô. Este sistema deriva suas estimativas de medições das quatro unidades de medição inercial (IMUs) do robô e codificadores de roda, que são baseados apenas no conhecimento prévio e disponível sobre o chamado modelo cinemático do robô (ou seja, uma descrição matemática da posição do robô Centro de massa).
“Achamos que, no caso de robôs com rodas (incluindo Ballbots), o estimador proposto constitui uma alternativa interessante para outros algoritmos de estimativa, como a filtragem de Kalman”, disse Geist. "O Wheelbot demonstra que uma escolha concisa das dimensões e do hardware de um robô monociclo com roda de reação produz um teste versátil para controle de robótica."

Crédito:Geist et al.
Geist e seus colegas foram os primeiros a criar um robô monociclo que pode pular com eficiência sobre suas rodas a partir de qualquer posição inicial. Seu artigo é, portanto, uma importante contribuição para o campo da robótica, pois resolve os desafios eletrônicos e mecânicos normalmente encontrados ao criar esse novo tipo de monociclos baseados em rodas de reação.
“Além de ser um teste desafiador para o controle de robôs, vemos um grande potencial para o Wheelbot como uma plataforma educacional que apresenta aos alunos a robótica”, disse Geist. "Nesse sentido, o Wheelbot é um exemplo típico para demonstrar a natureza interdisciplinar da robótica. Além de seu projeto mecânico exigir modelagem e simular a dinâmica bastante interessante do robô, o consumo de alta corrente de seus motores apresenta desafios significativos em seu projeto eletrônico."
No futuro, o Wheelbot poderá ser usado em ambientes educacionais e de pesquisa para testar redes de controle robótico, algoritmos de aprendizado de máquina e outros modelos. Uma das principais vantagens do robô é que sua operação requer apenas um conhecimento básico de engenharia de software, o que o torna uma plataforma experimental ideal para estudantes e engenheiros que estão dando seus primeiros passos na robótica.
Pesquisadores da equipe de Trimpe estão agora trabalhando em uma nova versão de seu robô, chamada Wheelbot v3. Um objetivo principal é tornar o robô ainda mais acessível, para que seja mais fácil construir, usar e experimentar.
“A próxima versão do Wheelbot será um pouco menor que a versão atual, usa um microcontrolador mais poderoso e, em termos de design de firmware, é mais fácil de operar”, acrescentou Geist. “Além disso, atualmente trabalhamos em um algoritmo de controle que orienta o Wheelbot ao longo de um caminho predefinido.
+ Explorar mais Um carro com rodas, quadrúpede e robô humanóide:Robot Swiss-Mile da ETH Zurich
© 2022 Science X Network