Ilustração conceitual da vestimenta robótica proposta. Crédito:Jonathan Realmuto/UCR
Os engenheiros da UC Riverside estão desenvolvendo "roupas" robóticas de baixo custo para ajudar crianças com paralisia cerebral a ganhar controle sobre os movimentos dos braços.
A paralisia cerebral é a causa mais comum de deficiência física grave na infância, e os dispositivos previstos para este projeto destinam-se a oferecer assistência diária de longo prazo para aqueles que vivem com ela.
No entanto, os robôs tradicionais são rígidos e não são confortáveis no corpo humano. Habilitado por uma doação de US$ 1,5 milhão da National Science Foundation, este projeto está adotando a nova abordagem de construir dispositivos de tecidos macios, o que também facilitará o funcionamento mais natural dos membros.
"Os materiais duros não interagem bem com os humanos", disse Jonathan Realmuto, professor assistente de engenharia mecânica e líder do projeto da UCR. “O que buscamos ao usar materiais como nylon e elástico são essencialmente roupas robóticas”.
Essas roupas conterão regiões seladas e herméticas que podem inflar, tornando-as temporariamente rígidas e fornecendo a força para o movimento.
"Digamos que você queira flexionar o cotovelo para um bíceps. Podemos injetar ar em bexigas especialmente projetadas embutidas no tecido que impulsionariam o braço para frente", disse Realmuto.
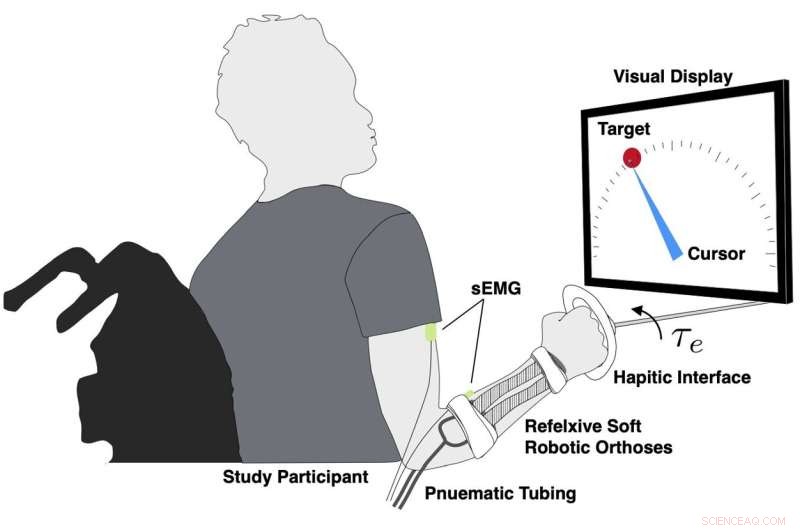
Configuração experimental para iterações anteriores do dispositivo. Crédito:Jonathan Realmuto/UCR
O projeto se concentrará não apenas na construção do robô, mas também no desenvolvimento dos algoritmos que ensinam a máquina a prever os movimentos que o usuário deseja executar.
"Um dos desafios críticos em fornecer assistência aos movimentos é interpretar a intenção de uma pessoa. Queremos um "controlador volitivo", para que o robô se comporte em termos do que o humano quer fazer", disse Realmuto. A equipe do projeto também inclui o professor assistente de engenharia mecânica da UCR Jun Sheng.
Um aspecto de tal controlador é usar uma variedade de pequenos sensores nas mangas para detectar pequenas tensões geradas pelos músculos quando eles se contraem. Esses sensores alimentarão os dados de tensão em um algoritmo que será treinado para extrair deles a intenção do usuário.
O uso de tecidos amplamente disponíveis, em vez de materiais rígidos tradicionais, provavelmente manterá o custo das mangas baixo. Além disso, a equipe pretende minimizar o uso de eletrônicos sofisticados, o que também ajudará a reduzir os custos gerais para os pacientes.
Este projeto está sendo realizado em parceria com o Hospital Infantil de Orange County, onde pacientes de uma clínica pediátrica de distúrbios do movimento ajudarão a testar e refinar os protótipos.
Além disso, a equipe de pesquisa realizará reuniões anuais no hospital para cada um dos quatro anos do projeto. Essas reuniões incluirão os pacientes e suas famílias, bem como terapeutas ocupacionais, e obterão seus comentários sobre a tecnologia à medida que ela se desenvolve.

Começando da esquerda, o atuador está em um estado despressurizado e movendo-se para a inflação em pressões crescentes. Crédito:Jonathan Realmuto/UCR
"Ao centralizar as partes interessadas em nosso processo de design, esperamos desenvolver um produto que realmente funcione para elas", disse Realmuto.
A equipe de desenvolvimento vê esse trabalho como um aumento da independência não apenas para os próprios pacientes pediátricos, mas também para comunidades inteiras.
“Se pudermos ajudar as crianças a escovar os próprios dentes, derramar água ou abrir portas, ações que outros dão como garantidas, é uma grande vitória para elas”, disse Realmuto. "Mas também é uma vitória para suas famílias e cuidadores."
Embora este projeto seja focado em crianças com distúrbios do movimento, a tecnologia pode eventualmente ser usada para outras aplicações e populações, incluindo pacientes geriátricos e outros adultos com problemas de movimento.
"Nossa tecnologia é universal", disse Realmuto.
+ Explorar mais Professor de engenharia mecânica projetará um robô 'soft' que poderia ser usado no espaço