
Os drones exploram o ambiente voando em diferentes direções. Quando um drone percebe outro drone em sua direção preferida, ele tentará voar em uma direção diferente. Quando isso não for possível (como nesta imagem), os drones de prioridade mais baixa sairão do caminho dos drones de prioridade mais alta. Drones lidam com obstáculos na hora, e assim entrar e sair de salas diferentes. Crédito:TU Delft / MAVLab
Os pesquisadores apresentaram um enxame de minúsculos drones que podem explorar ambientes desconhecidos completamente por si próprios. Este trabalho, apresentado em Ciência Robótica em 23 de outubro, é um passo significativo no campo da robótica de enxame. O desafio vem do fato de que os minúsculos drones de 33 gramas precisam navegar de forma autônoma, tendo recursos de detecção e computação extremamente limitados. A equipe de pesquisa conjunta - com pesquisadores da TU Delft, University of Liverpool e Radboud University of Nijmegen - enfrentaram esse desafio inspirando-se na relativa simplicidade da navegação por insetos.
Inspiração da natureza
Enxames de insetos inspiraram os roboticistas a pensar que pequenos robôs também podem superar suas limitações individuais operando em um enxame. Enxames de robôs pequenos e baratos seriam capazes de realizar tarefas que atualmente estão fora do alcance de grandes, robôs individuais. Por exemplo, um enxame de pequenos drones voadores seria capaz de explorar um local de desastre muito mais rápido do que um único drone maior. Esses enxames ainda não foram realizados.
Busca e resgate
Nos últimos quatro anos, uma equipe de pesquisa conjunta das universidades de TU Delft, Universidade de Liverpool, e Radboud University of Nijmegen, financiado pelo programa de inteligência artificial natural NWO da fundação científica nacional holandesa, tem se esforçado para projetar um enxame de minúsculos drones capazes de explorar ambientes desconhecidos. O objetivo do projeto de pesquisa era dar passos no sentido de usar enxames de drones em cenários de busca e salvamento.
A ideia principal era que, no futuro, Equipes de resgate serão capazes de lançar um enxame de minúsculos drones para explorar um local de desastre, como um prédio que está prestes a desabar. O enxame de drones entrará no prédio, explore-o, e volte para a estação base com as informações relevantes. As equipes de resgate podem, então, concentrar seus esforços nas áreas mais relevantes, por exemplo, onde ainda há pessoas dentro.

O minúsculo drone cabe na palma da mão e pesa 33 gramas. Junto com os outros drones em um enxame, é capaz de explorar rapidamente um ambiente não tripulado. Crédito:TU Delft / MAVLab
Encontrar vítimas
No projeto, pequenos drones foram equipados com câmeras e enviados em um ambiente interno de escritório para encontrar dois manequins representando as vítimas em um cenário de desastre. Essa tarefa de busca e resgate à prova de conceito mostrou claramente a vantagem de ter um enxame. Em seis minutos, um enxame de seis drones foi capaz de explorar cerca de 80 por cento das salas abertas, o que seria impossível para um dos drones sozinho. Além disso, a enxameação também se mostrou útil para redundância. Um drone encontrou uma vítima, mas devido a uma falha de hardware da câmera, não conseguiu trazer de volta nenhuma imagem. Felizmente, outro drone capturou a vítima na câmera, também.
Desafio
"O maior desafio para alcançar a exploração de enxames está no nível da inteligência individual dos drones, "diz Kimberly McGuire, o Ph.D. aluno que executou o projeto. “No início do projeto, focamos em alcançar capacidades básicas de vôo, como controlar a velocidade e evitar obstáculos. Depois disso, projetamos um método para que os pequenos drones detectem e evitem uns aos outros. Resolvemos isso fazendo com que cada drone carregasse um chip de comunicação sem fio e, em seguida, fazendo uso da intensidade do sinal entre esses chips - é como o número de barras mostradas em seu telefone que diminuem quando você se afasta do roteador WiFi em sua casa. As principais vantagens desse método são que ele não requer hardware extra no drone e requer muito poucos cálculos. "
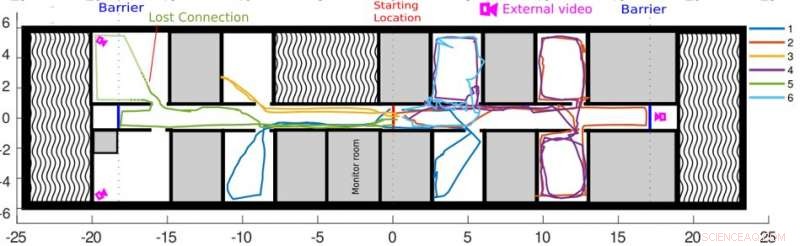
Trajetórias de 6 minúsculos drones explorando um andar inteiro de escritório em menos de 6 minutos. Os drones primeiro voam para longe da estação base no local inicial no meio, explore as salas abertas, e, finalmente, retornar à estação base Crédito:TU Delft / MAVLab
Navegação autônoma
O desafio mais assustador na forma de exploração de enxame, é a dificuldade de fazer pequenos robôs navegar sozinhos em um ambiente desconhecido. A razão para isso é que pequenos robôs são muito limitados em termos de detecção e computação.
Novamente, a natureza forneceu uma inspiração importante. Os insetos não fazem mapas altamente detalhados. Em vez de, eles retêm pontos de referência e locais relevantes para o comportamento, como fontes de alimento e seu ninho. "A ideia principal subjacente ao novo método de navegação é reduzir nossas expectativas de navegação ao extremo:exigimos apenas que os robôs sejam capazes de navegar de volta à estação base, "diz Guido de Croon, investigador principal do projeto. "O enxame de robôs primeiro se espalha no ambiente fazendo com que cada robô siga uma direção preferida diferente. Depois de explorar, os robôs retornam a um farol sem fio localizado na estação base. "
Algoritmo de bug
"O método de navegação proposto é um novo tipo de algoritmo de bug, "acrescenta Kimberly McGuire." Algoritmos de bug não fazem mapas do ambiente, mas lidam com os obstáculos na hora. Em princípio, mapas detalhados são muito convenientes, porque eles permitem que um robô navegue de qualquer ponto do mapa para qualquer outro ponto, ao longo de um caminho ideal. Contudo, os custos de fazer tal mapa em robôs minúsculos são proibitivos. O algoritmo de bug proposto leva a caminhos menos eficientes, mas tem o mérito de poder ser implementado até mesmo em robôs minúsculos. "














