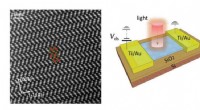
Um usuário que manipula a formação de um enxame de drones usando o SwarmTouch. Crédito:Tsykunov et al.
Pesquisadores do Instituto Skolkovo de Ciência e Tecnologia (Skoltech) na Rússia introduziram recentemente uma nova estratégia para melhorar as interações entre humanos e enxames robóticos, chamado SwarmTouch. Esta estratégia, apresentado em um artigo pré-publicado no arXiv, permite que um operador humano se comunique com um enxame de drones nano-quadrotor e guie sua formação, ao receber feedback tátil na forma de vibrações.
"Estamos trabalhando na área de enxame de drones e minha pesquisa anterior no campo da sensação ao toque foi muito útil na introdução de uma nova fronteira de interação humano-enxame tátil, "Dzmitry Tsetserukou, Professor da Skoltech e chefe do laboratório de Robótica Espacial Inteligente, disse TechXplore. "Durante nossos experimentos com o enxame, Contudo, entendemos que as interfaces atuais são muito hostis e difíceis de operar. "
Durante a realização de pesquisas investigando estratégias para interação humano-enxame, Tsetserukou e seus colegas perceberam que atualmente não há interfaces disponíveis que permitam aos operadores humanos implantar facilmente um enxame de robôs e controlar seus movimentos em tempo real. No momento, a maioria dos enxames simplesmente segue trajetórias predefinidas, que foram definidos por pesquisadores antes de os robôs começarem a operar.
A estratégia de interação humano-enxame proposta pelos pesquisadores, por outro lado, permite que um usuário humano guie os movimentos de um enxame de robôs nano-quadrotor diretamente. Ele faz isso considerando a velocidade da mão do usuário e alterando a forma de formação do enxame ou dinâmica de acordo, usando interligações de impedância simulada entre os robôs para produzir comportamentos que se assemelham aos de enxames que ocorrem na natureza.
O sistema desenvolvido pelos pesquisadores inclui uma tela tátil vestível que fornece padrões de vibração aos dedos de um usuário, a fim de informá-lo da dinâmica atual do enxame (ou seja, se o enxame está se expandindo ou diminuindo). Esses padrões de vibração permitem que os usuários humanos alterem a dinâmica do enxame para que o enxame possa evitar obstáculos simplesmente movendo suas mãos em diferentes velocidades ou em diferentes direções.
O sistema detecta a posição da mão do usuário usando um sistema de captura de movimento altamente preciso chamado Vicon Vantage V5. Além disso, o operador humano e os robôs individuais no enxame são conectados por meio de interlinks de impedância.
"Esses links se comportam como amortecedores de molas, "Tsetserukou explicou." Eles evitam que os drones voem perto do operador e uns dos outros e de partir ou parar abruptamente. Nossa estratégia melhora consideravelmente a segurança das interações humano-enxame e torna os comportamentos do enxame semelhantes aos de sistemas biológicos reais (por exemplo, enxames de abelhas). "
A principal vantagem da estratégia de interação humano-enxame desenvolvida por Tsetserukou e seus colegas é que ela permite que os usuários experimentem o movimento de um enxame de robôs diretamente com a ponta dos dedos. Também permite que os operadores alterem a dinâmica do enxame em tempo real, permitindo que os robôs naveguem em ambientes desordenados e complexos, como centros urbanos cheios de arranha-céus ou outros obstáculos.
Testes preliminares avaliando essa nova estratégia de interação tátil revelaram que os usuários são capazes de entender o que as vibrações na ponta dos dedos significam na maioria das vezes. A maioria dos participantes que participaram desses testes sentiu que a sensação tátil melhorou sua capacidade de guiar os drones, ao mesmo tempo em que torna sua comunicação com o enxame mais interativa.
No futuro, SwarmTouch, a estratégia desenvolvida por Tsetserukou e seus colegas, poderia ser usado para treinar enxames para navegar em armazéns, entregar mercadorias em ambientes urbanos e até inspecionar pontes ou outras infraestruturas. Os pesquisadores em breve apresentarão outra abordagem, chamado CloakSwarm, na conferência ACM Siggraph Asia 2019.
Eles também estão trabalhando em duas estratégias adicionais de interação humano-drone, SlingDrone e WiredSwarm, que será demonstrado na conferência ACM VRST 2019. SlingDrone, a primeira dessas estratégias, é um paradigma de realidade mista que permite aos usuários operar drones usando um controlador apontador de forma interativa, produzindo um movimento semelhante a um estilingue.
"Essa abordagem é um tanto semelhante ao popular jogo para celular Angry Birds, mas com usuários puxando um drone real com uma corda em vez de em uma tela de toque, a fim de navegar sua trajetória balística na realidade virtual, "Tsetserukou explicou." O SlingDrone permite que você aponte um drone virtual na direção em que deseja que ele voe e, ao mesmo tempo, um drone real voará para a posição do alvo e trará o objeto que você deseja agarrar. WiredSwarm, por outro lado, é um enxame de drones que são presos aos dedos do usuário com coleiras, que pode fornecer feedback tátil de alta fidelidade para um usuário de RV. Chamamos esse novo tipo de interface de primeira interface háptica vestível voadora. "
© 2019 Science X Network