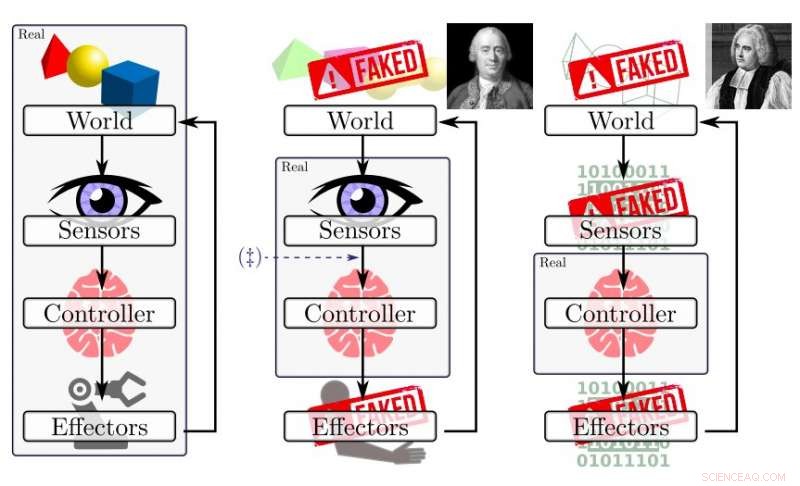
Uma ilustração de diferentes modos de falsificação combinados com posições intelectuais apropriadas:a visão ortodoxa (esquerda) e duas formas de ceticismo filosófico (centro e direita). A coluna da esquerda representa um experimento de robô físico de ponta a ponta, com cada parte sendo real. A coluna do meio, carregando o busto de David Hume, envolve sensores reais, mas também razão para duvidar da veracidade do mundo que relatam. A coluna mais à direita, liderado pelo Bispo Berkeley, tem um controlador real, mas todos os outros elementos são meros software - ele representa um experimento de robô conduzido em simulação (para o uso comum desse termo), onde a informação é injetada diretamente no córtex do robô. A coluna de Hume é o caso estudado no jornal:robôs percebem um mundo mediado por sensores que estão aterrados no mundo real, mas é um mundo de ‘nada além de sofisma e ilusão’. Crédito:Shell &O’Kane.
Para avaliar o desempenho de algoritmos e controladores de robótica, os pesquisadores normalmente usam simulações de software ou robôs físicos reais. Embora possam aparecer como duas estratégias de avaliação distintas, existe toda uma outra gama de possibilidades que combinam elementos de ambos.
Em um estudo recente, pesquisadores da Texas A&M University e da University of South Carolina se propuseram a examinar cenários de avaliação e execução que se encontram em uma interseção entre simulações e implementações reais. Sua investigação, descrito em um artigo pré-publicado no arXiv, concentra-se especificamente em casos em que robôs reais percebem o mundo por meio de seus sensores, onde o ambiente que eles sentem pode ser visto como uma mera ilusão.
“Consideramos problemas em que robôs conspiram para apresentar uma visão de mundo diferente da realidade, "Dylan Shell e Jason O'Kane, os pesquisadores que realizaram o estudo, escreveu em seu jornal. "A investigação é motivada pelo problema de validar o comportamento do robô fisicamente, apesar de haver uma discrepância entre os robôs que temos em mãos e aqueles que desejamos estudar, ou o ambiente de teste que está disponível versus o que é desejado, ou outras incompatibilidades potenciais nesta veia. "
O estudo se inspira em pesquisas biológicas anteriores, que teve como objetivo compreender as limitações de percepção dos organismos vivos e como as incompatibilidades de informação podem afetar seu comportamento. Nos últimos anos, biólogos começaram a usar ferramentas tecnológicas como realidade virtual (VR) e realidade aumentada (AR) para obter uma melhor compreensão dos organismos biológicos e suas percepções.
De forma similar, simulações de software se tornaram um componente-chave da pesquisa em robótica, com muitos pesquisadores usando-os para executar e testar seus sistemas e abordagens robóticas. Na maioria desses casos, um software de simulação reproduz alguns elementos da execução de um robô em um ambiente virtual, ao invés de físico, ambiente, gerar leituras de sensores artificiais ou dados relacionados ao estado.
Isso levanta outra questão:quão próximo está um simulador, que é um sistema em si, realmente reproduzir o mundo real? Com isso em mente, os pesquisadores começaram a explorar as relações entre pares de sistemas que "combinam entre si, "bem como casos em que um desses sistemas é poderoso o suficiente para conjurar uma ilusão no outro.
"Depois de formular o conceito de uma ilusão convincente, essencialmente uma noção de simulação de sistema que ocorre no mundo real, examinamos as implicações deste tipo de simulabilidade em termos de requisitos de infraestrutura, "Shell e O'Kane explicaram em seu artigo." O tempo é um recurso importante:alguns robôs podem ser capazes de simular outros, mas, possivelmente, apenas a uma taxa mais lenta do que em tempo real. "
Shell e O'Kane sugerem que as diferentes taxas nas quais os sistemas podem simular outros sistemas permitem que os pesquisadores descrevam os sistemas simulados e simulados de uma forma relativa. Com base nesta suposição, eles desenvolveram alguns teoremas para delinear a relação entre um sistema simulado e um sistema simulado, oferecendo vários exemplos para cada um.
Subseqüentemente, os pesquisadores realizaram um experimento multi-robô simples com base na teoria que desenvolveram. Neste experimento, um robô tinha que completar uma tarefa simples de navegação em um campo ilimitado de obstáculos, tanto na simulação quanto em uma bancada de teste de robô físico. Suas descobertas sugerem que diferentes abordagens de simulação podem ter eficiências de tempo marcadamente diferentes na produção de uma ilusão para um determinado sistema.
As observações reunidas por Shell e O'Kane, bem como a teoria que desenvolveram, poderia ampliar a compreensão atual do software de simulação usado para avaliar abordagens de robótica, destacando novos aspectos da relação entre sistemas simulados e simuladores. Em seu trabalho futuro, eles poderiam explorar uma variedade de novas direções de pesquisa, por exemplo, estender sua teoria para abordar as noções de incerteza e não determinismo ou desenvolver uma teoria mais rica de ilusões eficientes.
© 2019 Science X Network