Crédito:Li et al.
Nos últimos anos, um número crescente de pesquisadores tem explorado o uso de braços robóticos ou mãos hábeis para resolver uma variedade de tarefas cotidianas. Embora muitos deles tenham realizado com sucesso tarefas simples, como agarrar ou manipulação básica, tarefas complexas que envolvem várias etapas e movimentos precisos / estratégicos têm se mostrado mais difíceis de resolver.
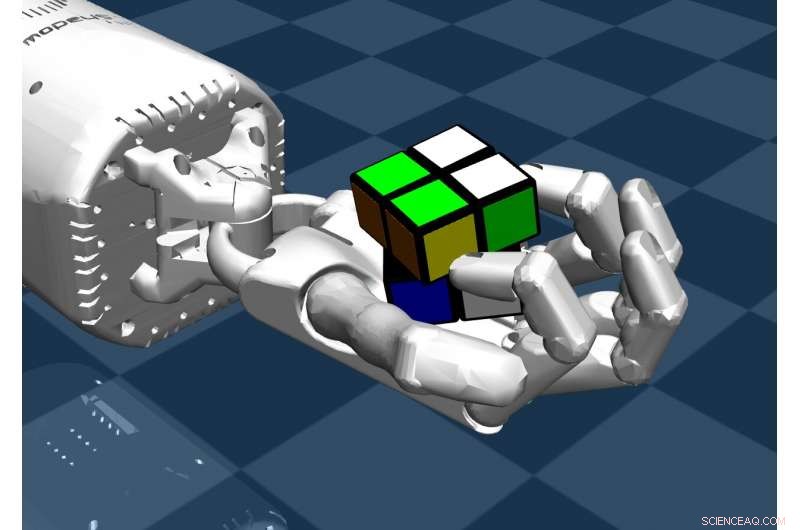
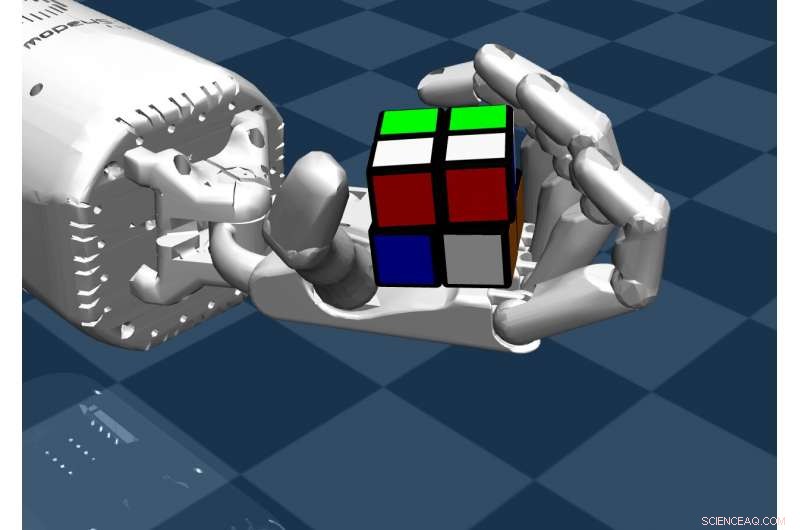
Uma equipe de pesquisadores da Universidade Chinesa de Hong Kong e do Tencent AI Lab desenvolveu recentemente uma abordagem baseada em aprendizagem profunda para resolver um Cubo de Rubik usando uma mão hábil com vários dedos. A abordagem deles, apresentado em um artigo pré-publicado no arXiv, permite uma mão hábil para resolver tarefas mais avançadas de manipulação manual, como o famoso quebra-cabeça Rubik's Cube.
Um cubo de Rubik é um cubo de plástico coberto por quadrados multicoloridos que podem ser colocados em diferentes posições. O objetivo do quebra-cabeça é torcer e girar estrategicamente as seções do cubo até que todos os quadrados em cada uma de suas faces sejam da mesma cor.
"Vendo alguns pesquisadores usarem mãos robóticas com vários dedos para tarefas como reposicionar um objeto e manipular uma ferramenta, consideramos se poderíamos utilizar uma mão de robô para tarefas mais complicadas, como resolver um cubo de Rubik, "Tingguang Li, um dos pesquisadores que realizou o estudo, disse TechXplore.
Para resolver o quebra-cabeça do Cubo de Rubik usando uma mão hábil, Li e seus colegas desenvolveram um modelo hierárquico de aprendizado por reforço profundo que essencialmente separa a tarefa em um estágio de planejamento e manipulação. Em seu estudo, os pesquisadores aplicaram essa abordagem a uma mão hábil de cinco dedos chamada Shadow Hand.
"Os desafios de resolver um cubo de Rubik usando uma mão de robô são dois:primeiro, controlar a mão de um robô é muito difícil, pois tem um alto grau de liberdade; segundo, resolver um cubo de Rubik requer uma longa sequência de movimento, "Li explicou." Nossa ideia combina um algoritmo de aprendizado de reforço profundo, que tem muitos aplicativos de sucesso, e conhecimento humano. O objetivo é mostrar a destreza de uma mão de robô e resolver um cubo de Rubik embaralhado aleatoriamente com uma alta taxa de sucesso.
O modelo hierárquico proposto pelos pesquisadores possui dois componentes principais:um para planejamento e outro para manipulação. Inicialmente, o componente de planejamento (ou seja, um solucionador de cubo baseado em modelo) identifica a sequência de modo ideal para resolver o quebra-cabeça. Então, o controlador de manipulação (ou seja, um operador de cubo sem modelo) controla os dedos da mão hábil para executar essas etapas.
"Nossa abordagem tem duas camadas:a camada superior planeja uma trajetória para resolver um Cubo de Rubik que é composto de ações atômicas, e a camada inferior aprende a implementar cada ação atômica, "Li disse." As ações atômicas são aprendidas por meio do modelo de aprendizado de reforço profundo, se livrar do projeto manual de controladores de baixo nível complicados. "
Os pesquisadores treinaram e avaliaram seu modelo usando um simulador de alta fidelidade, que eles também construíram. Eles testaram o desempenho de seu modelo em uma série de experimentos nos quais a mão habilidosa virtual foi alimentada com 1400 cubos de Rubik embaralhados aleatoriamente e descobriram que alcançou uma taxa média de sucesso de 90,3%.
"Mostramos que a mão do robô com vários dedos tem um enorme potencial para tarefas complicadas, "Li disse." A integração de algoritmos baseados em aprendizagem pode ajudar a reduzir o trabalho pesado de projetar algoritmos de controle manualmente. Espero que isso atraia mais pesquisadores para essa área e os incentive a desenvolver novas abordagens para aumentar ainda mais a destreza das mãos dos robôs. "
Crédito:Li et al.

Crédito:Li et al.
Crédito:Li et al.
Em contraste com as abordagens propostas anteriormente, o modelo desenvolvido por Li e seus colegas permite a conclusão de uma tarefa mais complexa de manipulação manual usando uma mão hábil, resolvendo especificamente um Cubo de Rubik. Até aqui, os pesquisadores apenas avaliaram sua abordagem em simulações, mas agora estão planejando aplicar seu algoritmo em uma mão robótica real.
© 2019 Science X Network