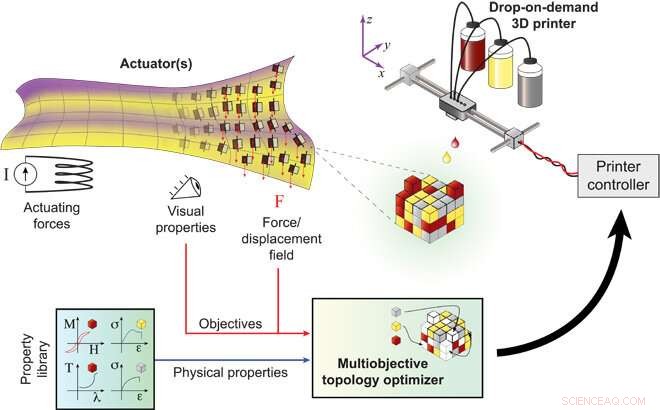
Visão geral do processo de impressão 3D baseado em especificações. A estrutura de atuadores individuais (ou o arranjo de vários atuadores) é otimizada usando um processo de otimização de topologia multiobjetivo. Observe que, em geral, a estrutura otimizada final pode ter qualquer formato arbitrário, conforme mostrado. A otimização usa as propriedades físicas em massa dos materiais individuais e os objetivos funcionais como entradas. A representação da estrutura baseada em voxel otimizada gerada é usada pela impressora para fabricar a estrutura otimizada usando um processo de impressão a jato de tinta sob demanda. Isso permite que projetos de alta dimensão sejam gerados e fabricados automaticamente com o mínimo de intervenção humana. Nesse trabalho, um polímero acrilato rígido (RIG), um polímero de acrilato elástico (ELA), e uma nanopartícula magnética (Fe3O4) / compósito polimérico (MPC) são os principais materiais utilizados. O contraste na óptica, mecânico, e as propriedades magnéticas são usadas para otimizar simultaneamente a aparência visual e as forças de atuação enquanto gera o design de nível de voxel. Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
Na ciência dos materiais e física aplicada, os pesquisadores esperam que os sistemas de atuação tenham um desempenho semelhante aos fenômenos naturais. Como um exemplo clássico, cientistas propuseram a engenharia de materiais bioinspirados que imitavam a camuflagem de chocos, embora a engenharia de tais sistemas altamente integrados possa ser um desafio devido à complexidade combinada de gerar projetos arquitetônicos de alta dimensão e materiais multifuncionais associados ao seu processo de fabricação. Em um relatório recente sobre Avanços da Ciência , Subramanian Sundaram e colegas dos departamentos de ciência da computação, A inteligência artificial e a engenharia elétrica nos EUA e na França apresentaram um protocolo completo sobre otimização de topologia multi-objetivo e impressão tridimensional (3-D) multimaterial drop-on-demand para a engenharia de atuadores complexos.
Os atuadores continham polímeros macios e rígidos acoplados a um composto de nanopartícula / polímero magnético que respondia a um campo magnético. O otimizador de topologia pode atribuir materiais para voxels individuais para aprimorar a aparência física de alta resolução. Quando eles unificaram a estratégia de design otimizado de topologia com o processo de fabricação multimaterial, Sundaram et al. poderia projetar atuadores complexos como uma rota promissora para a fabricação automatizada e orientada a objetivos.
Os robôs modernos requerem atuadores que integram várias funções dentro de um único pacote para altura otimizada, eficiência energética, topologia, tamanho e outras métricas de desempenho. Esta ideia fundamenta as propostas de pesquisa que defendem a integração estreita de sensoriamento, atuação e computação com materiais robóticos. Os pesquisadores ainda debatem se os robôs serão corpos com cérebros ou cérebros com corpos e, portanto, uma distinção entre materiais e máquinas ainda não foi estabelecida. O novo paradigma com materiais robóticos exige que as peças do robô sejam projetadas para várias funções e otimizadas para vários objetivos, como acontece com os organismos naturais.
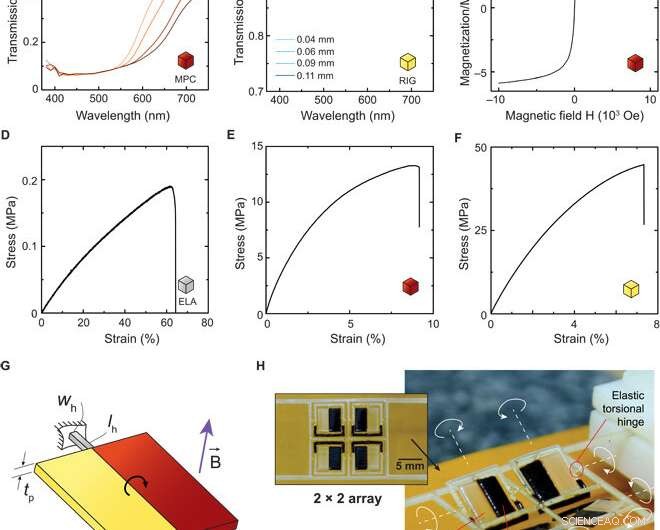
Biblioteca de propriedades de materiais. (A) A transmissão através do MPC mostrada como uma função do comprimento de onda para filmes de espessura variável, medido usando um espectrofotômetro. (B) A transmissão através do material rígido transparente mostrado como uma função do comprimento de onda para várias espessuras de filme. (C) Magnetização versus campo magnético aplicado para o MPC medido à temperatura ambiente. Nanopartículas magnéticas constituem aproximadamente 12% do peso total do MPC. Curvas de tensão-deformação mecânica típicas para o ELA, MPC, e o polímero rígido (RIG) são mostrados em (D) a (F), respectivamente. Módulos elásticos dos polímeros em deformações lineares, em média de três amostras cada, variam significativamente - ELA (528 kPa), MPC (507 MPa), e RIG (1290 MPa). (G) O esquema mostra o projeto fundamental baseado em dobradiça com comprimento do painel lp e espessura tp. Neste projeto, o painel é seccionado em duas partes iguais de RIG e MPC. O painel é fixado a limites rígidos em dois lados com dobradiças de torção ELA de comprimento lh, largura wh, e espessura th. Na aplicação de um campo magnético, a parte magnética do painel gera um torque. Isso é usado como o bloco fundamental nas amostras projetadas manualmente. (H) Imagem de uma matriz 2 × 2 de painéis, cada um com dois eixos de rotação. As regiões marrom-escuras da imagem mostram o material MPC, e as porções translúcidas mostram os materiais rígidos. As dobradiças de torção elásticas são quase idênticas ao polímero rígido em aparência. Na aplicação de um campo magnético, cada painel exibe uma combinação única de rotações angulares de dois eixos. A vista superior da amostra plana conforme impressa é mostrada à esquerda. (Crédito da foto:S.S. e D.S.K., MIT.) Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
O desafio com a reprodução de sistemas multifuncionais bioinspirados permanece no projeto de sistemas de atuação. No exemplo clássico de um sistema de atuação de um choco, o controle simultâneo de deflexões físicas e aparência de alta resolução resulta em camuflagem biológica eficaz. Reproduzir essa atuação perfeitamente integrada no laboratório é complicado devido à complexidade em criar um espaço de design de alta dimensão e fabricar esses designs com novos materiais e geometrias de forma livre.
Em exemplos contemporâneos de sistemas de atuação, os cientistas de materiais desenvolveram um dispositivo de microespelho digital com milhões de atuadores idênticos e um sistema de armazenamento de dados de alta densidade 'milípede' com cantiléveres do sistema microeletromecânico. Otimizando esses sistemas de atuação para consumo de energia, baixa pegada e confiabilidade do processo consomem tempo, enquanto as matrizes de atuadores não uniformes apresentaram complexidade adicional no laboratório. Como alternativa promissora, As técnicas de otimização de topologia oferecem layouts de material otimizados automaticamente em um determinado espaço de projeto.
No presente trabalho, Sundaram et al. usou uma estratégia de recozimento simulado anteriormente usada como uma abordagem de otimização de topologia bem-sucedida para projetar estruturas de treliça. Embora muito genérico em teoria, a abordagem considerou as especificidades do problema para ser eficaz na prática. Na abordagem atual, Sundaram et al. considerou o papel dos materiais, onde a técnica era totalmente consciente da fabricação. O estudo proposto em alta resolução, A estrutura multifísica e de otimização de topologia ciente de fabricação é uma primeira estratégia implementada no presente trabalho.
Os cientistas usaram um processo de fabricação de precisão capaz de lidar com projetos de alta dimensão para fabricar o atuador sintético. Depois disso, eles escolheram uma abordagem de fabricação 3-D aditiva rápida para a fabricação de atuadores para produzir estruturas complexas com diversos materiais. O interesse crescente em atuadores impressos 3-D se deve à sua velocidade e aplicabilidade na robótica de micro / mesoescala.
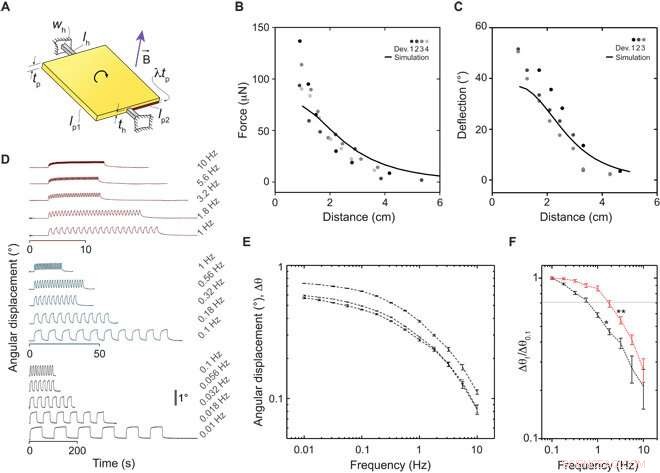
Características do atuador - Forças, deslocamentos, e largura de banda de atuação. (A) Para caracterizar o desempenho do atuador, os cientistas usaram o design fundamental com uma pequena mudança. Aqui, apenas uma fração da espessura do painel, tp, é preenchido com MPC, denotado por λ. Os seguintes resultados foram obtidos com um painel retangular de tamanho lp1 × lp2 =8 mm × 9 mm, espessura tp =1 mm, λ =0,15, e dobradiças com dimensões Wh =0,5 mm, lh =1 mm, e th =0,25 mm. (B) Forças de bloqueio medidas de quatro dispositivos idênticos mostrados como uma função da distância do ímã de 2 ″ por 2 ″ por 0,5 ″ junto com os resultados da simulação correspondentes. (C) Deflexões angulares medidas de três dispositivos idênticos em função da distância do ímã. (D) Deslocamentos angulares rastreados opticamente em função do tempo para atuação em frequências de 0,01 a 10 Hz. (E) Amplitudes de deslocamento angular em função da frequência para três dispositivos. (F) A largura de banda aparente de grande amplitude depende da configuração do campo magnético, uma vez que a força experimentada pelo próprio atuador varia com o deslocamento. Isso é destacado neste gráfico com dois casos - em um caso, a força experimentada pelo atuador aumenta monotonicamente com o deslocamento angular (⋆), e no outro caso, há um deslocamento angular estável quando o painel se alinha com a direção do gradiente máximo (⋆⋆). Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
Os cientistas já haviam explorado a propriedade de atuação magnética para matéria mole devido ao escalonamento favorável, alta densidade de força de atuação e atuação sem amarras. Sundaram et al. unificou uma técnica de otimização evolutiva biomimética com um processo de manufatura aditiva multimaterial automatizado para projetar e fabricar rapidamente atuadores de alta dimensão no presente trabalho. A abordagem poderia eventualmente permitir a fabricação totalmente automatizada de projetos de alta dimensão, que é um objetivo de longo prazo na robótica.
Os pesquisadores implementaram o processo de impressão 3-D personalizado sob demanda para otimizar todo o pipeline de fabricação e realizar melhorias com base na fabricação. Eles projetaram um atuador específico em um plano, estrutura rígida com células sintéticas preenchidas com um polímero rígido transparente ou um polímero responsivo magneticamente escuro. O otimizador de topologia controlou o posicionamento dos dois materiais em relação às suas propriedades de material para aplicações ideais. Sundaram et al. em seguida, combinou um processo de impressão 3D sob demanda multimaterial personalizado com a otimização da topologia multiobjetivo para projetar os projetos de atuadores de alta dimensão no laboratório. Eles criaram um conjunto de tintas curáveis por ultravioleta (UV) com uma variedade de efeitos que incluem ótica, propriedades magnéticas e mecânicas, em seguida, caracterizou as amostras para gerar uma biblioteca de propriedades.
O nenúfar impresso é colocado em interfaces de fluido e acionado usando um ímã permanente. Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
Os cientistas usaram uma impressora 3D multimaterial baseada em jato de tinta feita sob medida. Eles usaram um polímero de acrilato rígido (RIG), um polímero de acrilato elástico (ELA) e um composto de polímero de nanopartículas magnéticas (MPC) juntamente com tintas iniciais otimizadas para o processo de impressão a jato de tinta. Após a deposição da tinta, eles usaram uma matriz de diodo emissor de luz ultravioleta (LED) para reticular a tinta por meio de fotopolimerização de radical livre. Os três materiais continham módulos elásticos e propriedades do material amplamente variáveis, permitindo-lhes fazer juntas suaves e estruturas rígidas para uso como atuadores. Os cientistas demonstraram suas capacidades e fabricaram uma variedade de conjuntos de atuadores multimateriais projetados manualmente. Eles ciclaram os atuadores projetados e projetados por pelo menos 1000 ciclos sem degradação do desempenho.
Sundaram et al. investigou as aplicações de atuadores magnéticos macios baseados em multimateriais impressos em 3-D usando um eletroímã alimentado por uma fonte de corrente para gerar um campo magnético sintonizável. Como prova de conceito, eles desenvolveram quatro pétalas individuais para atuação magnética em uma interface ar-água, onde as pétalas emergiram da interface da água. Para atuação repetível, eles colocaram as amostras impressas em uma interface de óleo de silicone-água. Esses exemplos projetados manualmente foram os primeiros a destacar a fabricação de aditivos multimateriais juntamente com a atuação magnética. A estratégia integrou perfeitamente a impressão multimaterial e a otimização da topologia para demonstrar propriedades ópticas de alta resolução.
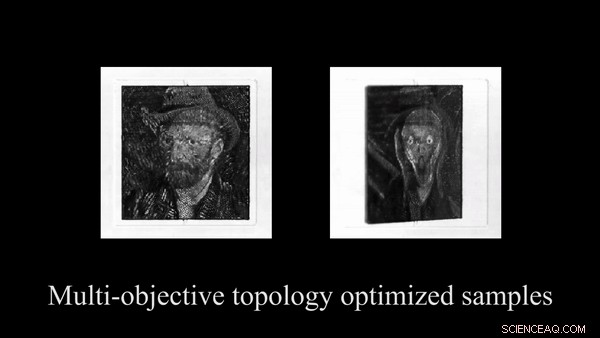
Otimização da topologia de atuadores. Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
Os cientistas otimizaram a topologia multiobjetivo usando software de simulação para entender a distribuição das células MPC (Magnetic nanoparticle polímero) para atuação magnética. Eles então aplicaram o método a duas imagens diferentes de pinturas que incluíam um autorretrato de Van Gogh e o "Grito" de Munch. Depois de aplicar a estrutura de otimização de topologia, eles controlaram a atuação magnética com um campo magnético aplicado para fazer a transição gradual das imagens do retrato de Van Gogh para o retrato de Munch, aumentando os ângulos de inclinação / deflexão. Os cientistas então caracterizaram o atuador com topologia otimizada com testes de longo prazo.
Desta maneira, Subramanian Sundaram e colegas desenvolveram um otimizador de topologia para corresponder às propriedades ópticas do alvo e seus ângulos de inclinação. Os cientistas, adicionalmente, acoplaram uma impressão 3-D baseada em jato de tinta sob demanda com a técnica de otimização para projetar designs otimizados por topologia e gerar propriedades ópticas de alta resolução. Embora existam desafios no desenvolvimento de novas tintas e materiais, eles poderiam fabricar uma ampla variedade de materiais usando o processo.
Os pesquisadores podem projetar todo o duto de fabricação para maior liberdade de controle com otimização com reconhecimento de fabricação. O atuador com topologia otimizada e o kit de ferramentas de fabricação que o acompanha podem ser usados para projetar atuadores com sensores e elementos básicos de computação para realizar a visão de longa data de compostos robóticos / autônomos multifuncionais com integração em grande escala e autossuficiência. Quando os cientistas exploram ainda mais essas estratégias fundamentais, eles serão capazes de formar atuadores multifuncionais com mínima intervenção humana.
© 2019 Science X Network