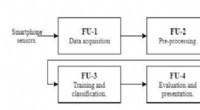
O dispositivo SensFoot. Crédito:Moschetti et al
Pesquisadores do Instituto de BioRobótica de Scuola Superiore Sant "Anna, Co-Robotics srl e Sheffield Hallam University propuseram recentemente uma nova abordagem para melhorar as interações entre humanos e robôs enquanto caminham juntos. Seu papel, publicado em MDPI's Robótica Diário, propõe o uso de sensores vestíveis como meio de melhorar a colaboração entre um ser humano e um robô que se movem em um ambiente compartilhado.
Os avanços tecnológicos recentes permitiram o emprego de robôs como assistentes em uma ampla gama de situações da vida cotidiana. Para ter um bom desempenho na maioria dessas configurações, Contudo, os robôs devem ser capazes de interagir com usuários humanos de maneira contínua e eficaz. Pesquisadores têm desenvolvido abordagens e técnicas para aumentar a capacidade dos robôs de entender os sinais sociais e responder de acordo.
Em seu estudo, a equipe se concentrou particularmente em tarefas que envolvem humanos e robôs caminhando juntos ou realizando uma tarefa que envolva ficar em pé e se mover em um ambiente compartilhado. O objetivo deles era desenvolver uma abordagem que permitisse aos humanos se moverem naturalmente em um determinado espaço junto com um robô, sem a necessidade de ligações físicas entre os dois.
"Este artigo propõe o uso de unidades de medida inercial vestíveis (IMUs) para melhorar a interação entre humano e robô enquanto caminham juntos sem ligações físicas e sem restrição na posição relativa entre o humano e o robô, "escreveram os pesquisadores em seu artigo.
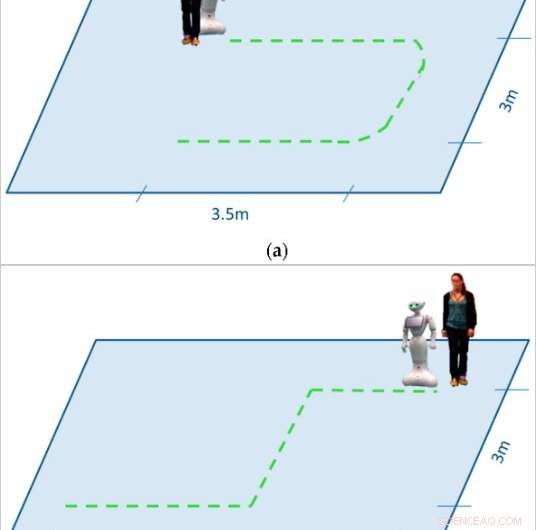
Esquema da tarefa seguinte (a) e tarefa siga-me (b). Crédito:Moschetti et al.
A abordagem proposta pelos pesquisadores envolve o uso de sensores IMU, que são dispositivos eletrônicos que medem e informam a orientação, velocidade e outros dados relativos aos movimentos, normalmente usando acelerômetros, giroscópios e / ou magnetômetros. Esses sensores são usados por humanos (por exemplo, em seus sapatos) sem causar desconforto, permitindo assim que eles se movam livremente em seu espaço circundante.
As IMUs coletam informações em tempo real sobre os movimentos do usuário humano e parâmetros relacionados à marcha (por exemplo, velocidade de caminhada, comprimento da passada, ângulo de orientação, etc.). Subseqüentemente, esses dados são processados e usados para moldar o movimento do robô, em última análise, criando uma interação mais natural entre os dois agentes.
Os pesquisadores construíram um protótipo de sistema IMU chamado SensFoot e avaliaram sua precisão e eficácia em uma série de experimentos que envolveram humanos e robôs interagindo uns com os outros. Eles recrutaram 19 participantes humanos e pediram que completassem duas tarefas diferentes, à qual eles se referem como uma "tarefa seguinte" e uma tarefa "siga-me".
Primeiro, eles verificaram a precisão de seu sistema comparando as informações de caminhada calculadas por um sistema de visão de referência com aquelas derivadas de dados coletados pelas IMUs. Subseqüentemente, eles testaram os sensores em um cenário real de interação humano-robô.
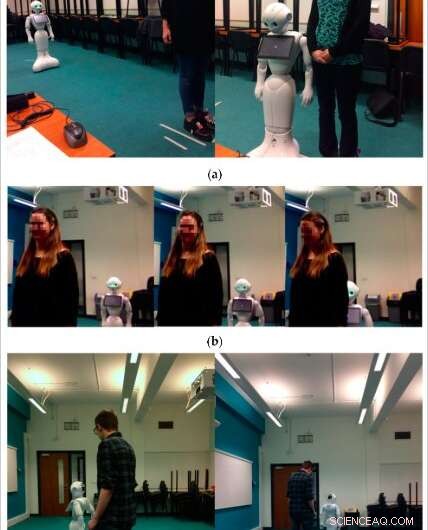
Exemplo de testes com usuários (a) e sequências da tarefa seguinte (b) e da tarefa siga-me (c). Crédito:Moschetti et al.
"Experimentamos com 19 participantes humanos em duas tarefas diferentes, para fornecer avaliações em tempo real dos parâmetros de marcha para um robô móvel se movendo junto com um humano, e estudou a viabilidade e a usabilidade percebida pelos participantes, "escreveram os pesquisadores." Os resultados mostram a viabilidade do sistema, que obteve feedback positivo dos usuários, fornecendo informações valiosas para o desenvolvimento de um sistema de interação natural, onde o robô percebe os movimentos humanos por meio de sensores vestíveis. "
As avaliações realizadas pelos pesquisadores renderam resultados altamente promissores, sugerindo que o uso de IMUs pode melhorar significativamente as interações entre humanos e robôs que se movem em um espaço compartilhado. Além disso, o feedback coletado dos participantes que testaram os sensores foi extremamente positivo. No futuro, a abordagem proposta pelos pesquisadores pode abrir caminho para soluções de robótica assistiva mais adaptáveis e eficientes que envolvam a integração de IMUs ou outros sensores com algoritmos de aprendizado de máquina.
"Trabalhos futuros dizem respeito à possibilidade de melhorar a percepção do sistema do usuário que anda, melhorando a precisão nos parâmetros extraídos, e a adaptabilidade do robô, superando as limitações atuais de controle e integração, "escreveram os pesquisadores.
© 2019 Science X Network