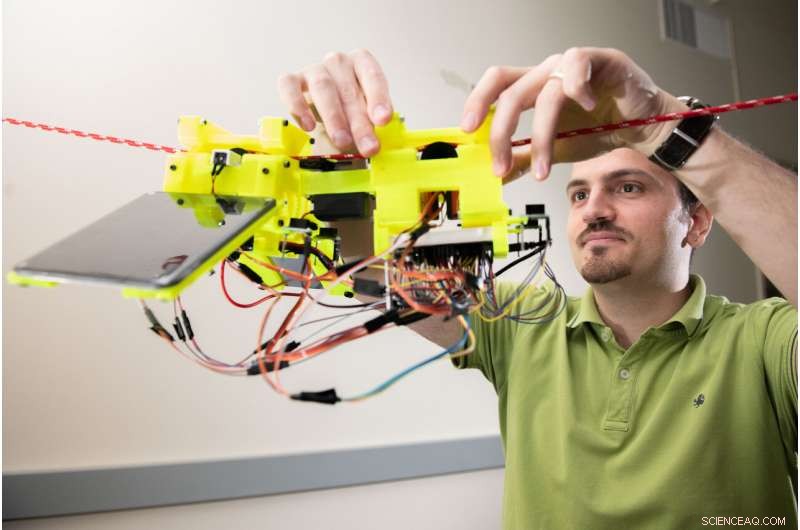
O assistente de pesquisa de pós-graduação Gennaro Notomista mostra os componentes do SlothBot em um cabo em um laboratório da Georgia Tech. O robô é projetado para ser lento e eficiente em termos de energia para aplicações como monitoramento ambiental. Crédito:Allison Carter, Georgia Tech
Para monitoramento ambiental, agricultura de precisão, manutenção de infraestrutura e certos aplicativos de segurança, lento e energeticamente eficiente pode ser melhor do que rápido e sempre precisando de uma recarga. É aí que entra o "SlothBot".
Alimentado por um par de painéis fotovoltaicos e projetado para permanecer no dossel da floresta continuamente por meses, O SlothBot se move apenas quando precisa medir as mudanças ambientais - como clima e fatores químicos no ambiente - que podem ser observadas apenas com uma presença de longo prazo. O robô hipereficiente à prova de conceito, descrito em 21 de maio na Conferência Internacional sobre Robótica e Automação (ICRA) em Montreal, pode em breve estar pendurado entre os cabos das copas das árvores no Jardim Botânico de Atlanta.
"Na robótica, parece que estamos sempre buscando mais rápido, robôs mais ágeis e radicais, "disse Magnus Egerstedt, Steve W. Chaddick School Chair da School of Electrical and Computer Engineering do Georgia Institute of Technology e investigador principal do Slothbot. "Mas existem muitas aplicações em que não há necessidade de ser rápido. Você apenas precisa estar lá persistentemente por longos períodos de tempo, observando o que está acontecendo. "
Com base no que Egerstedt chamou de "teoria da lentidão, "O assistente de pesquisa de pós-graduação Gennaro Notomista projetou o SlothBot junto com seu colega, Yousef Emam, usando peças impressas em 3D para os mecanismos de engrenagem e de troca de fios necessários para rastejar por uma rede de fios nas árvores. O maior desafio para um robô rastreador de arame é mudar de um cabo para outro sem cair, Disse Notomista.
"O desafio é segurar suavemente um fio enquanto agarra outro, "ele disse." É uma manobra complicada e você tem que fazer certo para fornecer uma transição à prova de falhas. Certificar-se de que os interruptores funcionam bem por longos períodos de tempo é realmente o maior desafio. "
Mecanicamente, O SlothBot consiste em dois corpos conectados por uma dobradiça acionada. Cada corpo abriga um motor de acionamento conectado a um aro no qual um pneu é montado. O uso de rodas para locomoção é simples, energeticamente eficiente e mais seguro do que outros tipos de locomoção com fio, dizem os pesquisadores.
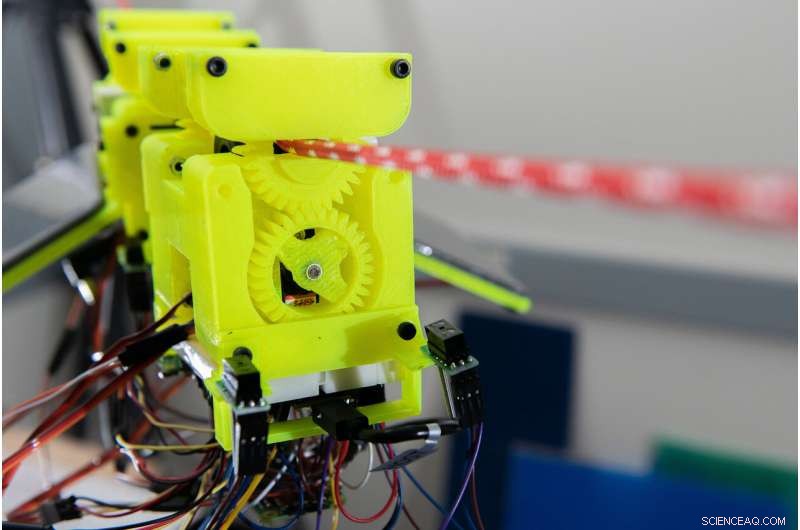
A imagem mostra os componentes do SlothBot, que é alimentado por dois painéis fotovoltaicos. Engrenagens e interruptores impressos em 3D ajudam o robô a passar de um cabo para outro. Crédito:Allison Carter, Georgia Tech
O SlothBot tem operado até agora em uma rede de cabos no campus da Georgia Tech. Próximo, uma nova cápsula impressa em 3-D - que faz o robô parecer mais com uma preguiça - protegerá os motores, engrenagens, atuadores, máquinas fotográficas, computador e outros componentes da chuva e do vento. Isso irá preparar o terreno para estudos de longo prazo na copa das árvores no Jardim Botânico de Atlanta, onde Egerstedt espera que os visitantes vejam um SlothBot monitorando as condições já neste outono.
O nome SlothBot não é uma coincidência. As preguiças da vida real são pequenos mamíferos que vivem nas copas das florestas da América do Sul e Central. Ganhar a vida comendo folhas de árvores, os animais podem sobreviver com o equivalente calórico diário de uma pequena batata. Com seu metabolismo lento, as preguiças descansam até 22 horas por dia e raramente descem das árvores, onde podem passar a vida inteira.
"A vida de uma preguiça é muito lenta e não há muita emoção no dia-a-dia, "disse Jonathan Pauli, professor associado do Departamento de Ecologia Florestal e da Vida Selvagem da Universidade de Wisconsin-Madison, que consultou a equipe Georgia Tech sobre o projeto. "A coisa boa sobre uma história de vida muito lenta é que você realmente não precisa de muita entrada de energia. Você pode ter uma longa duração e persistência em uma área limitada com pouquíssima entrada de energia por um longo período de tempo."
Isso é exatamente o que os pesquisadores esperam do SlothBot, cujo desenvolvimento foi financiado pelo U.S. Office of Naval Research.
"Há muito que não sabemos sobre o que realmente acontece sob densas áreas cobertas de árvores, "Egerstedt disse." Na maior parte do tempo, o SlothBot estará apenas curtindo, e de vez em quando ele se moverá para um local ensolarado para recarregar a bateria. "
Os pesquisadores também esperam testar o SlothBot em uma plantação de cacau na Costa Rica que já abriga verdadeiras preguiças. “Os cabos usados para mover o cacau se tornaram uma superestrada da preguiça porque os animais os consideram úteis para se movimentar, "Egerstedt disse." Se tudo correr bem, vamos implantar SlothBots ao longo dos cabos para monitorar as preguiças. "

Jonathan Pauli observa uma preguiça de dois dedos descer por um cabo em uma plantação de cacau no nordeste da Costa Rica. Pauli tem colaborado com M. Zachariah Peery para estudar preguiças arbóreas no campo por uma década. Crédito:M. Zachariah Peery
Egerstedt é conhecido por algoritmos que conduzem enxames de pequenos robôs com rodas ou voadores. Mas durante uma visita à Costa Rica, ele se interessou por preguiças e começou a desenvolver o que chama de "uma teoria da lentidão" junto com o professor Ron Arkin na Escola de Computação Interativa da Georgia Tech. A teoria potencializa os benefícios da eficiência energética.
“Se você está fazendo coisas como monitoramento ambiental, você quer ficar na floresta por meses, "Egerstedt disse." Isso muda a maneira como você pensa sobre os sistemas de controle em um alto nível. "
Robôs voadores já são usados para monitoramento ambiental, mas suas necessidades de alta energia significam que não podem demorar muito. Robôs com rodas podem sobreviver com menos energia, mas podem ficar presos na lama ou ser prejudicados pelas raízes das árvores, e não pode obter uma visão geral do solo.
"O que custa energia mais do que qualquer outra coisa é o movimento, "Egerstedt disse." Mover-se é muito mais caro do que sentir ou pensar. Para robôs ambientais, você só deve se mover quando for absolutamente necessário. Tínhamos que pensar em como seria. "
Para Pauli, que estuda uma variedade de vida selvagem, trabalhar com Egerstedt para ajudar SlothBot a ganhar vida tem sido gratificante.
“É ótimo ver um robô inspirado na biologia das preguiças, "disse ele." Tem sido divertido compartilhar como as preguiças e outros organismos que vivem nesses ecossistemas por longos períodos vivem suas vidas. Será interessante ver robôs espelhando o que vemos em comunidades ecológicas naturais. "