Uma ilustração do framework proposto em um manipulador planar. Crédito:Chamzas, Shrivastava e Kavraki.
Embora os humanos possam executar movimentos naturalmente e instantaneamente, robôs requerem estratégias avançadas de planejamento de movimento para navegar em seus arredores. O planejamento de movimento é, portanto, uma área-chave da pesquisa robótica, visa o desenvolvimento de ferramentas e técnicas que permitem aos robôs operar de forma autônoma em uma variedade de ambientes.
Embora estudos anteriores tenham introduzido uma variedade de técnicas de planejamento de movimento, mais notavelmente algoritmos baseados em amostragem, a maioria deles não tem um desempenho ideal em todos os ambientes. Uma limitação importante de muitas dessas abordagens é que elas aproximam a conectividade de espaços de alta dimensão com um pequeno número de amostras, o que dificulta seu desempenho em cenários onde áreas necessárias à conectividade do espaço têm baixa probabilidade de serem amostradas. Isso é comumente referido como o "problema das passagens estreitas".
Para lidar com as limitações dos métodos de planejamento de movimento existentes, pesquisadores da Rice University, no Texas, desenvolveram uma nova abordagem que decompõe o espaço de trabalho em primitivos locais, memorizar suas experiências locais na forma de amostradores locais e armazená-los em um banco de dados. Seu método, descrito em um artigo pré-publicado no arXiv, é principalmente uma prova de conceito, já que até agora só foi testado em uma configuração geométrica bastante simplificada. Apesar disso, o trabalho desses pesquisadores tem o potencial de resolver alguns desafios-chave encontrados na pesquisa de planejamento de movimento.
"Nosso estudo se concentrou exclusivamente no problema de planejamento de movimento geométrico, "Constantinos Chamzas, um dos pesquisadores que realizou o estudo, contado TechXplore . "Em poucas palavras, você tem um robô e alguns obstáculos e deseja encontrar um caminho para mover seu robô do ponto A ao ponto B sem colidir com os obstáculos. "
Além desses recursos gerais de planejamento de movimento, em cenários da vida real (por exemplo, durante a execução de tarefas domésticas), um robô também deve resolver consultas de planejamento de movimento que se repetem continuamente. A maioria das abordagens de planejamento de movimento existentes forçam os robôs a concluir tarefas da vida real, resolvendo novas consultas do zero, mesmo que uma nova consulta seja semelhante a uma que foi concluída com êxito no passado.

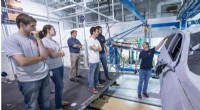
Exemplo de um robô pegando cilindros de uma estante de livros, que é uma tarefa com consultas de planejamento de movimento repetitivo. Crédito:Chamzas, Shrivastava e Kavraki.
Os pesquisadores estão, portanto, tentando desenvolver novas técnicas que usem as soluções para planos de movimento anteriores para informar a busca por uma solução para uma nova consulta de planejamento de movimento semelhante. A abordagem desenvolvida por Chamzas e seus colegas consegue isso usando conhecimento prévio relacionado ao ambiente que visa especificamente passagens estreitas encontradas anteriormente para adaptar sua estratégia de amostragem para o problema em questão.
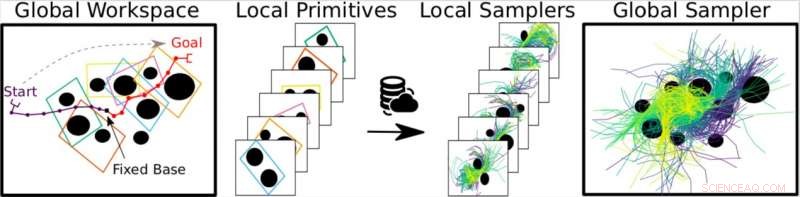
"Durante o treinamento, o método proposto divide o problema dado em subproblemas mais fáceis, resolvendo cada um individualmente, e, em seguida, armazena essas sub-soluções em um banco de dados na forma de distribuições de amostragem, "Chamzas explicou." Quando surge um novo problema de planejamento, o problema global é decomposto em problemas locais novamente, e nosso método recupera as distribuições de amostragem relevantes que correspondem às locais para criar uma distribuição de amostragem global que orienta a pesquisa de forma muito mais informativa. "
Essencialmente, a abordagem de planejamento de movimento desenvolvida por Chamzas e seus colegas divide um problema em subproblemas, combinando métodos tradicionais de banco de dados com amostragem informada. Isso o distingue das abordagens existentes, que normalmente usam um banco de dados com soluções pré-calculadas que são reparadas em tempo de execução ou usam modelos que tentam inferir uma boa distribuição de amostragem para um determinado ambiente.
"As duas principais contribuições do nosso estudo são que certos problemas, que antes eram praticamente impossíveis de resolver com métodos tradicionais, pode ser resolvido sendo decomposto e que usar esta combinação de bancos de dados / amostragem é mais eficaz em certos casos do que outros métodos, "Chamzas disse.
Até aqui, os pesquisadores avaliaram seu método em testes preliminares com primitivas geométricas simples. Os resultados são promissores, já que seu método permitiu que eles resolvessem problemas que as abordagens anteriores não eram capazes de resolver ou resolviam de maneira muito fraca.
No futuro, a abordagem proposta por Chamzas e seus colegas pode ajudar a superar algumas das limitações das abordagens de planejamento de movimento existentes, permitindo que os robôs transfiram o conhecimento previamente adquirido para diferentes ambientes e, assim, melhorando seu desempenho. Os pesquisadores agora planejam aplicar a mesma abordagem em ambientes geométricos mais complicados. Eles também gostariam de explorar maneiras pelas quais seu método poderia aprender distribuições de amostragem, em vez de ajustá-los a soluções mais antigas.
© 2019 Science X Network